V
主页
京东 11.11 红包
Lorenz Meier 主讲 PX4 2019 年发展路线图
发布人
PX4 2019 年发展路线图,欢迎提交中文字幕。
打开封面
下载高清视频
观看高清视频
视频下载器
【无人机】Pixhawk硬件标准更新(FMUv5x) | 由Pixhawk/PX4创始人Lorenz Meier讲解 | PX4开发者峰会@ETH苏黎世联邦理工
Lorenz Meier - 准备迎接一个万物飞行的世界(WORLD.MINDS MOBILITY 2018)
低成本超小自主飞行无人机,开导!
Auterion在线讲座公开课 - 使用SDK控制PX4驱动的无人机
【开源飞控】QGroundControl(QGC地面站)入门教学
【无人机】PX4飞控的过去现在和未来 | 由PX4创始人Lorenz Meier博士讲解 | PX4开发者峰会@ETH苏黎世联邦理工大学
【开源飞控】Pixhawk:无人机上的社区驱动的开源标准 | 创始人Lorenz Meier与核心开发者们 | PX4线上开发者峰会2020·直播录像
【PX4开源飞控无人机】入门教学:在Linux(Ubuntu)上安装搭建PX4开发环境 | Brian Philips
【开源无人机】室内款低成本无人机M0-F250介绍及代码讲解(源码资源链接在简介)
【无人机】PX4在STEM教育的应用 | 这个团队结合树莓派做了很多有疯狂的项目 | 由俄国团队COEX演讲 | PX4开发者峰会
【无人机】PX4飞行任务架构 | 由Dennis Mannhart与Matthias Grob讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
国外大佬的Pixhawk 4飞控开箱
【PX4开源飞控无人机】MAVROS Python使用教程(一):安装与基本设置 | Farhang Naderi
【无人机】计算机视觉前瞻 | 研讨会 | 由Julian Kent与Lorenz Meier主持 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【无人机】使用NXP恩智浦参考硬件的合作设计机会 | 由NXP无人机团队Iain Galloway与Gerald Peklar讲解 | PX4开发者峰会2019
【DIY开源无人机】国外大神的 Holybro Pixhawk 4 开箱
[视频教学] 快速实现 PX4 Offboard 模式飞行以及 Gazebo 仿真 | 无人机自动驾驶GAAS 01
【无人机】PX4视觉和Offboard控制接口 | 由Auterion计算机视觉工程师Martina Rivizzigno讲解 | PX4开发者峰会2019
【PX4开源飞控无人机】多旋翼控制原理概述 从传感器到动力输出 | 两位Auterion工程师主讲 | PX4线上开发者峰会2020·直播录像
【PX4开源无人机】UAVCAN | Pavel Kirienko | PX4线上开发者峰会2020
【无人机】ROS2为PX4增添新动力 | 由Nuno Marques讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【开源无人机】从零调试一架开源无人机M0-F250
PX4软件在环(SITL)仿真现已支持FlightGear
PX4 SITL与Microsoft Airsim终于解决兼容性问题 | 仿真飞行演示
【无人机】硬错误调试HardFault Debugging | 由David Sidrane讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【无人机】像实飞一样测试:为libuavcan实现实机测试 | 由Scott Dixon讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【Painless360】航模遥控入门 - PWM,PPM,CPPM,S-BUS,Sat. 协议的区别和选择
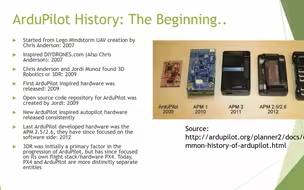
开源无人机飞控ArduPilot历史简介 (2018)
【PX4开源飞控无人机】入门教学:在MacOS上安装搭建PX4开发环境 | Brian Philips
无人机开发仿真现在可以模拟天气影响啦 | PX4在FlightGear进行SITL仿真
【PX4开源飞控】这是无人机?飞机?不,是Jetman!| Flybotix研发工程师Julien Lecoeur | PX4线上开发者峰会2020·直播录像
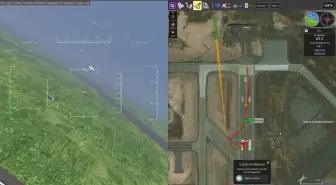
PX4+ROS+SVO 2.0 仿真+实机 | 解决城镇物流最后一公里问题:自主无人机快递把快递送到你的阳台
【PX4开源无人机】在经过适航认证的飞行器上使用PX4需要注意什么? | Gokul Krishna Srinivasan | PX4线上开发者峰会2020
【阿木实验室】状态估计公开课录像 2018-11-17【高清版】
【PX4开源飞控无人机】超视距无人机的软件和工业标准的未来 | James Howard | PX4线上开发者峰会2020·直播录像
【PX4开源飞控无人机】GE的高级载具动力学仿真的开源工作流程 | Matt Vacanti · Jesse Hoskins | PX4线上开发者峰会2020
【思动学院】VMware虚拟机Ubuntu/Linux系统满帧率运行Gazebo仿真 | PX4入门之开发环境搭建视频教学
【PX4开源飞控】独立SoC的开放平台帮助打造高性能AI人工智能无人机 | 96Boards总监Yang Zhang | PX4线上开发者峰会2020·直播录像
【FPV穿越机电调】BLHeli_32完全解读12P | 由Joshua Bardwell与Ryan Harrell讲解
【PX4开源无人机】航空机器人在高风险环境的自主路径规划 | Tung Dang | PX4线上开发者峰会2020