V
主页
SMUG Planner:一种适用于移动机器人在复杂环境中的安全多目标规划器
发布人
论文 https://arxiv.org/abs/2306.05309
打开封面
下载高清视频
观看高清视频
视频下载器
机器人空间感知基础
通用机器人路径思考:scaling law、数据飞轮和具身智能
超材料类蛇直线运动机器人
字节万级GPU集群LLM训练
Google Deepmind机器人,语言到行动
下一代机器人感知:3D场景图,可验证算法,自监督学习
基于主动推理的复杂任务在线Pareto最优决策案例
构建内部摆线型机器人执行器
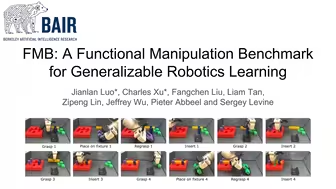
FMB:泛化机器人学习的功能性操作基准
一种结构化方法来实现机器人学习泛化
[ICML 2023]PaLME-多模态具身智能机器人
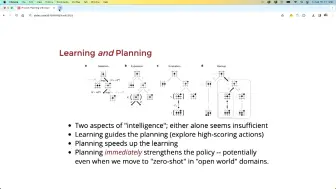
通过学习规划和感知进行任务和运动规划
GPT-4V应用于机器人视觉语言规划
一种具身方法让机器人不惧与环境接触
Berkeley EECS研讨会讨论:Future of Robotics
Real World Robotics Tutorial3:识别机器人的运动学和动力学
OpenCV空间AI比赛中,UCA机器人团队的安全人机协作算法
数据金字塔结构管理机器人数据
凸集图及在最优控制和运动规划中应用
机器人泛化学习
AI提升机器人手部灵活性
基于抽样的任务和运动规划:从机器人操作到智能CAD再到分析蛋白质
开源通用机器人构建
机器人中的数值方法
行业视角看AI 机器人的发展
学习野生3D动植物视觉感知
通过扩散策略进行机器人灵活操作
凸集图规划
RSS2024:用于基于语言机器人导航的层级开放词汇 3D 场景图
[CVPR2023] TarViS: 一种基于目标的统一视频分割方法
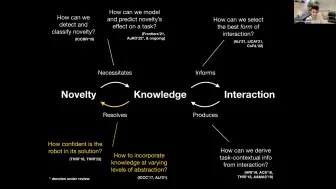
动态环境中安全可靠的机器人RL
Ameca机器人及一些讨论
SynH2R:合成的手-物体运动以学习人机间物体传递
物理世界中的生成AI用于软体机器人设计
高分辨率触觉感知在反应式机器人操作中的应用
机器人学习中运动表示
自适应协作机器人
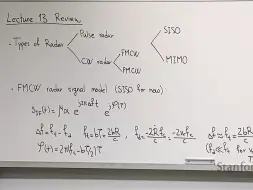
Stanford EE259:MIMO成像雷达、到达方向估计和目标检测
学习和控制以实现具身智能的安全性、效率和弹性
足式机器人的视觉全身操控与运动