V
主页
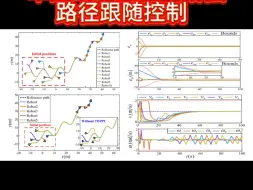
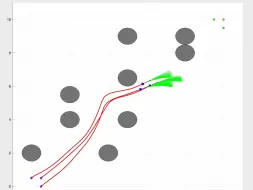
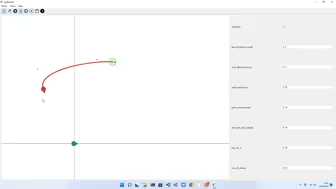
trans:欠驱无人船轨迹跟踪 路径规划 处理洋流扰动
发布人
提出了一种欠驱动船舶通用路径的轨迹跟踪和路径跟踪控制策略。我们的工作受到以前在地面车辆上的工作的启发和激励。特别地,我们将为地面车辆引入的手位置点的定义扩展到自主水面车辆和自主水下车辆,然后将手位置点作为基于输入-输出反馈线性化方法的控制策略的输出。所提出的策略能够处理影响船舶的外部干扰,例如恒定和不旋转的洋流。利用李雅普诺夫分析,我们能够证明闭环系统具有全局指数稳定的外部动力学和最终有界状态的内部动力学,对于轨迹跟踪和路径跟随控制问题都是如此。最后,给出了一个仿真案例和实验结果,以验证理论结果。
打开封面
下载高清视频
观看高清视频
视频下载器
TAC: 多目标跟踪 时变编队 多目标围捕
耦合A星 DWA路径规划算法 动态障碍物
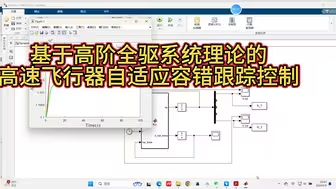
基于高阶全驱系统理论的高速飞行器自适应容错跟踪控制
【自制】水下无人艇三维动态路径规划 避障 模型预测控制
网络移动机器人单曲线瞬态性能增强的路径跟随控制 matlab 仿真程序 移动机器人,投影弧长,增强瞬态性能,基于跟踪微分器的规定性能控制(TDPPC)
多智能体 避碰 轨迹转换 分布式MPC
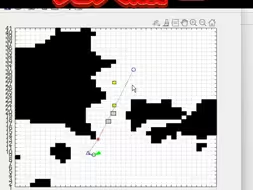
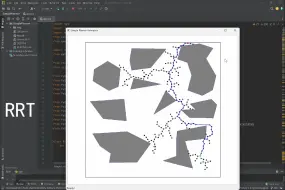
实现了一些经典的机器人路径规划算法。
2024.5.30 Astar路径规划
编队 动态窗口法 DWA 动态路径规划 dwa 编队 队形 Matlab
零基础一小时看懂路径规划《agv无人小车篇》第一集-介绍(合集附带代码)
路径规划|比A*快百倍的跳点搜索JPS算法(ROS/Python/Matlab仿真)
多智能体基于观测器的事件触发跟踪一致性控制
【Webots仿真寄录】三角舵轮-路径规划与控制
异构FPGA的HPS运行ROS2+路径规划,逻辑侧Drive-on-chip实现6轴机械臂控制
无人车 自动驾驶 自动避障
基于神经势场方法的机器人运动路径规划演示
航天器 时变滑模 自适应控制 饱和控制器 考虑推力器安装偏差
【UE蓝图进阶】四叉树在蓝图里的应用 | 聚合 | 空间查询 | 路径规划
四艘水面无人艇(USV)于水面完成基于市场交易的车辆路径规划问题(VRP)的任务
阿德莱德大学等联合发布MEXGEN!高效率无人机信息收集路径规划
改进A*算法 五方向 路径规划算法 动态扩展点 剪枝 Astar A星 astar 路径规划 改进
Automatica2: 移动机器人分布式编队控制
2024.6.3 Bspline规划
OTO Planner: An Efficient Only Travelling Once Exploration Planner
【UE蓝图进阶】02 四叉树在蓝图里的应用 | 聚合 | 空间查询 | 路径规划
导航遇到故障不用怕,原路倒回去就好了!
多移动机器人 事件触发 编队控制(抗干扰 固定时间)考虑非线性系统运动学和动力学自适应固定时间滑模干扰观测器基于事件触发的固定时间编队控制器
数字孪生之Unity 机械臂路径规划 ur16e
一万台规模以上的多智能体寻路:完备和最优的LaCAM*算法碾压CBS各个变种
多智能体分布式事件触发固定时间一致性控制
auto4:多智能体分布式事件触发有限时间一致性控制
ICAPS 2020 Zhang Han Multi-Agent Path Finding with Mutex Propagation
一个简单的基于贝塞尔曲线的路径规划控制器
零基础一小时看懂路径规划《agv无人小车篇》第二集-混合遗传算法论文原理讲解《合集附代码》
Turtlebot4+ROS2+新版Gazebo仿真试玩
编队 人工势场法 APF 保持队形 动态障碍物 动态避障 apf 路径规划 编队 动态规划
【Carla】Hybrid A* 寻路算法演示
车辆路径问题-北大白晨旭、褚宸源、檀容韬
这能拿国奖吗?兄弟们
【UE蓝图进阶】03 四叉树 | DrawDebugBox | 半尺寸 | 实用的节点