V
主页
京东 11.11 红包
Dynamics and Control 6-2 Modal Analysis Worked Example 1 [19iIv_bFF7A]
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
Dynamics and Control 1-1 Undamped Oscillation [pYH5-pncK6M]
Dynamics and Control 7-1 Modal Analysis Context [mQ3Jwbnmj1Q]
Dynamics and Control 7-2 Modal Analysis 2DOF Example [nlXC4u6Jjxs]
Dynamics and Control 1-3 Damped Oscillation [mpXisovA3n4]
Dynamics and Control 3-1 SDOF Response to Forcing Funtions_ Theory [tvGoUC9LivQ]
Dynamics and Control 9-2 Random Processes [1Rduz-pWRks]
Dynamics and Control 3-4 SDOF Response Example 2 [fMfuVjA0HVo]
Dynamics and Control 5-2 Two degree of freedom example [cfP6uITk6Dk]
Dynamics and Control 4-1 Fourier Series [zB24b1Ivmrk]
Dynamics and Control 12-1 Solution to 2014 Exam Q1 [JT09UW0pc0A]
Dynamics and Control 11-1 Revision Chapters 5-8 [ocj2adnM28U]
Dynamics and Control 8-1 Energy and Lagrange's Equation [U5rwsmwNtYA]
Dynamics and Control 12-2 Sample Exercise Q21 [8MHE30s9DqM]
Dynamics and Control 2-3 Ch 2 Exercise 5 [PYtL1E5AsDk]
Dynamics and Control 3-3 Damped Reponse and Beating [8JwSvo-NZW8]
Dynamics and Control 9-5 Random Process Example [r0hQD-qbvwc]
Dynamics and Control 10-2 Sample Exercise Q6 [2WL2k4z22uU]
14. Orthogonal Vectors and Subspaces [YzZUIYRCE38]
12. Graphs, Networks, Incidence Matrices [6-wh6yvk6uc]
27. Vibration of Continuous Structures_ Strings, Beams, Rods, etc [1xJJu5p3dD0]
2. Elimination with Matrices [QVKj3LADCnA]
Dynamics and Control 9-3 Fractals [shQ3JxMi_vo]
5. Transposes, Permutations, Spaces R^n [JibVXBElKL0]
16. Projection Matrices and Least Squares [osh80YCg_GM]
9. Independence, Basis, and Dimension [yjBerM5jWsc]
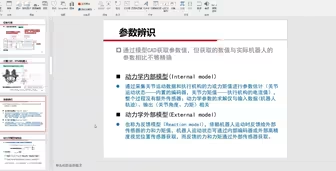
动力学方程参数辨识
21. Vibration Isolation [f1pxiNDTyHc]
19. Introduction to Mechanical Vibration [9_d8CQrCYUw]
32. Quiz 3 Review [HgC1l_6ySkc]
双滑块并联机构多目标优化设计(刚度最大化、占地空间最小化)
机器人MATLAB-Adams联合仿真
4. Movement of a Particle in Circular Motion w_ Polar Coordinates [iMz0LiqjFmE]
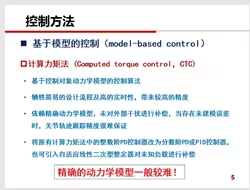
机器人计算力矩控制(computed torque control)与滑模控制(sliding mode control)
17. Practice Finding EOM Using Lagrange Equations [cd8lDtAtJbE]
3. Multiplication and Inverse Matrices [FX4C-JpTFgY]
机械臂前馈控制(torque Feedforward control)
31. Change of Basis; Image Compression [0h43aV4aH7I]
23. Differential Equations and exp(At) [IZqwi0wJovM]
复杂非线性约束的多目标优化设计-以三自由度球面并联机构为例
机器人SolidWorks-simscape联合仿真