V
主页
京东 11.11 红包
机器人操作系统ROS2之Launch
发布人
了解机器人操作系统ROS2中launch 的功概念
打开封面
下载高清视频
观看高清视频
视频下载器
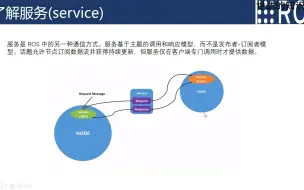
机器人操作系统ROS2-了解服务
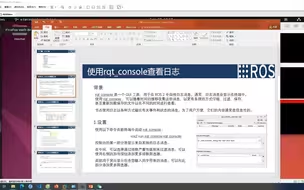
机器人操作系统ros2中使用rqt_console
在Ubuntu22.04上安装ROS2 Iron
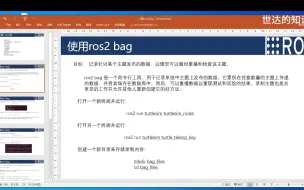
机器人操作系统ROS2 bag使用方法
《ROS 2机器人开发从入门到实践》6.5.2使用 Gazebo 接入 ros2_control
机器人操作系统ROS2-了解参数
ubuntu22.04安装ROS2-20240807
ros2创建功能包
机器人操作系统ROS2话题
ROS2_STM32_invertedpendulm
基于ROS2的树莓派自主定位与导航小车
使用urdf在ROS2中构建四足机器人的Gazebo和Mujoco仿真
使用ROS2-Control + OCS2来控制四足机器人
了解机器人操作系统ROS2中action
机器人操作系统ROS2节点(node)
南方科技大学发明的类生物四足机器人,够酷!
机器人操作系统 ROS2 基本参数设置及rqt使用方法
《ROS 2机器人开发从入门到实践》6.4.1安装与使用Gazebo构建世界
RDT-1B:解密全球最大的双臂机器人扩散大模型
硬核+开源 稚晖君Dummy机械臂全新升级谐波无刷电机版 - Dummy2 它来了!😄
《ROS 2机器人开发从入门到实践》6.2.2 在RViz中显示机器人
水下航行器_gazebo+ros2+mpc
《ROS 2机器人开发从入门到实践》6.2.5完善机器人执行器部件
微雪 UGV Rover 和 UGV Beast安装Jetson Orin和电池教程
《ROS 2机器人开发从入门到实践》6.2.4创建机器人及传感器部件
《ROS 2机器人开发从入门到实践》6.1 机器人建模与仿真概述
《ROS 2机器人开发从入门到实践》6.2.3使用Xacro简化URDF
成为机器人专家的第一步:掌握这3个前提条件 🤖
《ROS 2机器人开发从入门到实践》6.5.1ros2_control介绍与安装
【手把手教做轮足机器人】6_运动学逆解【原理+代码】
在isaaclab中开发viplanner端到端导航
《ROS 2机器人开发从入门到实践》5.3.2通过C++发布动态TF
《ROS 2机器人开发从入门到实践》5.2Python中的手眼坐标变换
《ROS 2机器人开发从入门到实践》6.4.3 使用Gazebo标签扩展URDF
《ROS 2机器人开发从入门到实践》5.4.1常用可视化工具rqt
《ROS 2机器人开发从入门到实践》6.4.6惯性测量传感器仿真
《ROS 2机器人开发从入门到实践》6.3.2为机器人部件添加质量与惯性
《ROS 2机器人开发从入门到实践》5.3.1 通过C++发布静态TF
《ROS 2机器人开发从入门到实践》6.4.4 使用两轮差速插件控制机器人