V
主页
机器人操作系统ROS2-了解参数
发布人
了解机器人操作系统ROS2中参数的概念
打开封面
下载高清视频
观看高清视频
视频下载器
机器人操作系统 ROS2 基本参数设置及rqt使用方法
机器人操作系统ROS2节点(node)
ubuntu22.04安装ROS2-20240807
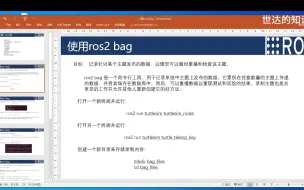
机器人操作系统ROS2 bag使用方法
Linux shell基本命令用法
在Ubuntu22.04上安装ROS2 Iron
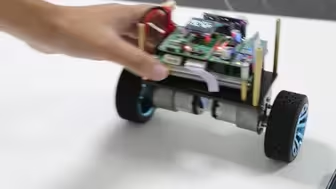
3.平衡小车PID参数调节讲解
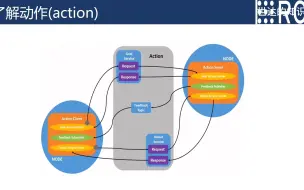
了解机器人操作系统ROS2中action
机器人操作系统ROS2话题
把EXPMA参数设置为4和19,连续600天零失误
机器人操作系统ROS2之Launch
《ROS 2机器人开发从入门到实践》2.5.1ROS2基础之编程:面向对象编程C++示例
《ROS 2机器人开发从入门到实践》 1.4.4 在Linux中编写C++代码
VMware17 安装ubuntu22.04
MACD修改12个参数,连续实战500天零失误
《ROS 2机器人开发从入门到实践》3.3.2订阅pose实现闭环控制
《ROS 2机器人开发从入门到实践》3.1话题通信介绍
《ROS 2机器人开发从入门到实践》4.1.2基于服务的参数通信
ros2创建功能包
《ROS 2机器人开发从入门到实践》3.4.5订阅数据并用Qt显示
水下航行器_gazebo+ros2+mpc
机器人操作系统ros2中使用rqt_console
强化学习在ROS2中实现巡线小车
《ROS 2机器人开发从入门到实践》 1.4.3 在Linux中编写Python代码
ROS2版DUMMY - 目标(末端位姿)跟随 - Gazebo仿真 CPP程序控制pose实时反馈 Moveit2实时规划
《ROS 2机器人开发从入门到实践》3.4.3系统信息获取与发布
ROS2 零基础入门教材推荐
《ROS 2机器人开发从入门到实践》 1.4.1 Linux终端基础操作
ROS2入门系列视频教程 (八)| ROS2话题通信的c++实现发布方
《ROS 2机器人开发从入门到实践》 2.1.2编写你的第一个节点( C++ 示例)
《ROS 2机器人开发从入门到实践》2.5.3.2多线程与回调函数C++示例
《ROS 2机器人开发从入门到实践》 2.4 多功能包的最佳实践WorkSpace
《ROS 2机器人开发从入门到实践》 1.4.5 Linux基础之环境变量
《ROS 2机器人开发从入门到实践》 2.1.1编写你的第一个节点(Python示例)
《ROS 2机器人开发从入门到实践》 2.2 使用功能包组织Python节点
《ROS 2机器人开发从入门到实践》2.5.1ROS2基础之编程:面向对象编程Python示例
《ROS 2机器人开发从入门到实践》4.1.1服务通信介绍
《ROS 2机器人开发从入门到实践》3.2.2订阅小说并合成语音
Visual studio code 中使用cmake构建C++程序
《ROS 2机器人开发从入门到实践》 2.3 使用功能包组织C++节点