V
主页
京东 11.11 红包
了解机器人操作系统ROS2中action
发布人
介绍机器人操作系统ROS2中动作(action)的概念。
打开封面
下载高清视频
观看高清视频
视频下载器
ubuntu22.04安装ROS2-20240807
在Ubuntu22.04上安装ROS2 Iron
机器人操作系统ROS2-了解参数
机器人操作系统 ROS2 基本参数设置及rqt使用方法
机器人操作系统ROS2话题
Linux shell基本命令用法
机器人操作系统ROS2节点(node)
机器人操作系统ROS2 bag使用方法
硬核+开源 稚晖君Dummy机械臂全新升级谐波无刷电机版 - Dummy2 它来了!😄
ros2创建功能包
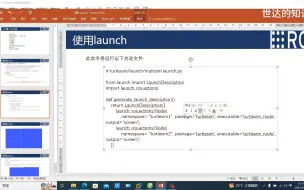
机器人操作系统ROS2之Launch
【B站最强小白运维课】2024年乌班图(Ubuntu24.04)入门级全套完整课程,包含运维岗位分析系统命令/云服务器!
(开源)哪吒ROS2基础使用--NeZha键盘控制与可视化 >> NeZha_Mini ROS2 学习教程(旭日派、视觉AI、自动驾驶、服务、智能救援机器人、)
水下航行器_gazebo+ros2+mpc
使用ROS2 Control来控制四足机器人
ROS2系列教程-〖基础篇7〗: Navigation2实战基础demo
机器人操作系统ros2中使用rqt_console
使用ROS2-Control + OCS2来控制四足机器人
《ROS 2机器人开发从入门到实践》5.2Python中的手眼坐标变换
基于ROS2的树莓派自主定位与导航小车
(开源)哪吒ROS2基础使用--核心llaunch文件讲解 >> NeZha_Mini ROS2 学习教程(旭日派、视觉AI、建
VMware17 安装ubuntu22.04
(开源)哪吒ROS2 基础使用--雷达驱动与可视化>> NeZha_Mini ROS2 学习教程(旭日派、视觉AI、建图导航、自动驾驶、服务、智能救援机器人、)
《ROS 2机器人开发从入门到实践》5.4.2 数据化可视工具Rviz
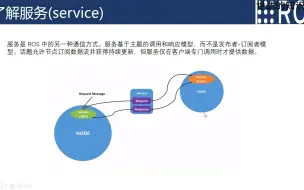
机器人操作系统ROS2-了解服务
《ROS 2机器人开发从入门到实践》6.2.2 在RViz中显示机器人
《松灵ROS 2开讲啦》第8期 机械臂的使用
《ROS 2机器人开发从入门到实践》6.2.3使用Xacro简化URDF
《ROS 2机器人开发从入门到实践》5.1.2对TF原理的简单探究
《ROS 2机器人开发从入门到实践》4.6.1使用Launch启动多个节点
DIY了一款深度学习小车
《ROS 2机器人开发从入门到实践》5.3.2通过C++发布动态TF
《ROS 2机器人开发从入门到实践》4.6.2使用launch传递参数
《ROS 2机器人开发从入门到实践》4.4.2订阅参数更新
《ROS 2机器人开发从入门到实践》6.2 使用URDF创建机器人
《ROS 2机器人开发从入门到实践》4.4.3客户端代码实现
《ROS 2机器人开发从入门到实践》4.5.1参数声明与设置
无人机对地目标识别与跟踪
《ROS 2机器人开发从入门到实践》6.1 机器人建模与仿真概述
《ROS 2机器人开发从入门到实践》4.5.2接收参数事件