V
主页
【Advanced控制理论】9_状态观测器设计_Linear Observer Design_Matlab_Simulink建模(上)
发布人
状态观测器的原理与设计。此视频为上半部分,下半部分视频将用Matlab/Simulink来分析控制器的表现。 6/6/2018: 原视频出现了计算错误,请参照下面链接的视频,有具体解释 https://www.bilibili.com/video/av24445731/
打开封面
下载高清视频
观看高清视频
视频下载器
扩张状态观测器与自抗扰控制
【Advanced控制理论】9_状态观测器设计_Linear Observer Design_Matlab_Simulink建模(下)
【Advanced控制理论】2_状态空间_State Space
【Advanced控制理论】16_Nonlinear Adaptive Controller_非线性自适应控制器
【Advanced控制理论】10_可观测性与分离原理_观测器与控制器_Observability_Separation Principle
【Advanced控制理论】6_稳定性_李雅普诺夫_Lyapunov
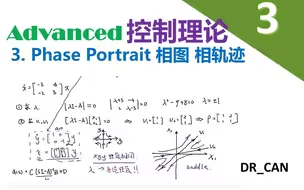
【Advanced控制理论】3_Phase Portrait_相图_相轨迹
Matlab simulink 中的观测器设计
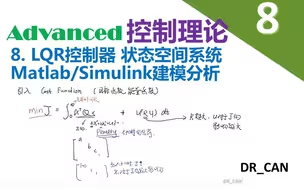
【Advanced控制理论】8_LQR 控制器_状态空间系统Matlab/Simulink建模分析
1、扰动观测器的基本原理(频域篇)(Disturbance Observer)
MATLAB中基于观测器的反馈控制
【Advanced控制理论】15_Nonlinear Backstepping Control_反馈线性化控制_Feedback Linearization
IF开环启动切龙伯格观测器Matlab仿真
【Advanced控制理论】11_现代控制理论串讲(state space)
【自动控制原理】3_一起燃烧卡路里/科学减肥(1)_系统分析实例_数学建模部分_Matlab/Simulink
自抗扰控制导读 V:扩张状态观测器
【自动控制原理】12_PID控制器_Matlab/Simulink仿真【开场三分钟闲话】
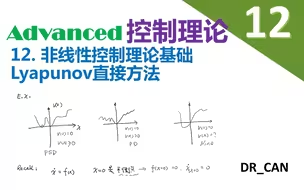
【Advanced控制理论】12_非线性理论基础_Lyapunov直接方法
现代控制理论-状态观测器极点配置问题
【MPC模型预测控制器】1_最优化控制和基本概念
【Modern Control Theory】7_状态观测器
【工程数学基础】2_线性化_泰勒级数_泰勒公式_Linearization
【动态系统的建模与分析】16_伯德图_手绘技巧与应用_Bode Plot_Part2
龙伯格观测器Simulink建模及代码生成—STM32G4 Simulink FOC开发实战
【Advanced控制理论】7_线性控制器设计_Linear Controller Design
【自动控制原理】10_超前补偿器_Lead Compensator_PD控制器_比例微分控制
【Advanced控制理论】14_Nonlinear Basic Feedback Stabilization_非线性系统稳定性设计
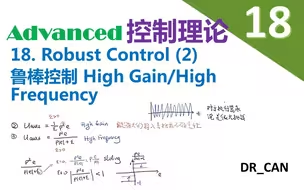
【Advanced控制理论】18_Robust Control (2)_鲁棒控制_High Gain_High Frequency
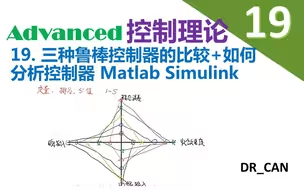
【Advanced控制理论】19_三种鲁棒控制器的比较+如何分析控制器_Matlab Simulink
【自动控制原理】1_开环系统和闭环系统_反馈控制_Open/Closed Loop System_Feedback
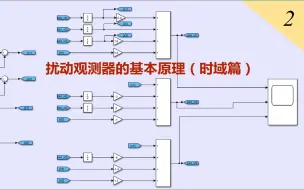
2、扰动观测器的基本原理(时域篇)
【动态系统的建模与分析】1_课程介绍
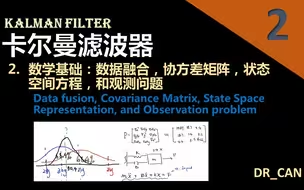
【卡尔曼滤波器】2_数学基础_数据融合_协方差矩阵_状态空间方程_观测器问题
降维观测器一道题直接学会
【Advanced控制理论】5_系统的可控性_Controllability
线性系统理论——全维状态观测器
【Advanced控制理论】_3.5_连续系统离散化
【工程数学基础】8_如何在Matlab Simulink 搭建传递函数??Transfer Function
【Advanced控制理论】1_介绍
【卡尔曼滤波器】1_递归算法_Recursive Processing