V
主页
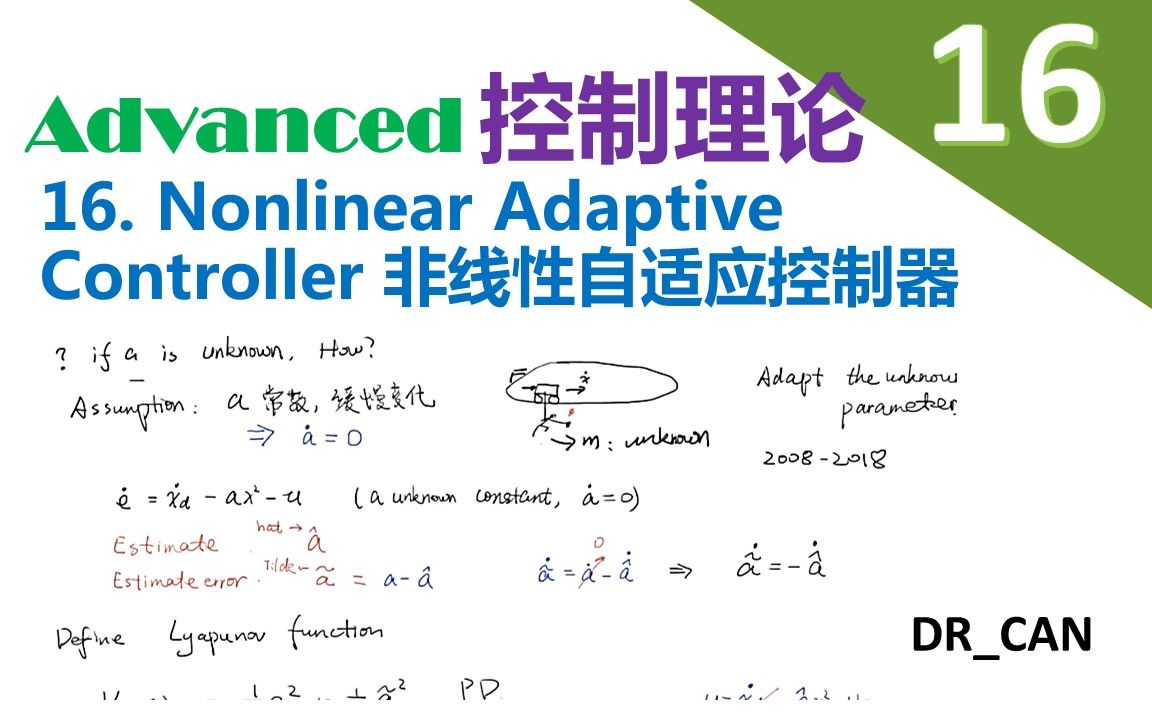
【Advanced控制理论】16_Nonlinear Adaptive Controller_非线性自适应控制器
发布人
介绍了自适应控制器(Adaptive controller)的设计方法。 答案在这里 https://www.bilibili.com/read/cv909710
打开封面
下载高清视频
观看高清视频
视频下载器
(自适应)滑模控制-从入门到制导实战
0基础直接带你上手matlab simulink仿真(不是标题党,讲解超级细致用心)(非线性系统自适应控制器的搭建)
【模型参考自适应控制1】入门
【219】 一类不确定非线性系统的自适应预设时间控制问题
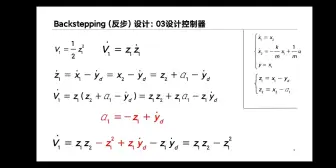
【非线性控制理论】反步设计法(个人最详细的讲解)
滑模控制基本概念,非线性系统控制器设计以及simulink仿真初步
MATLAB 非严格反馈非线性自适应神经控制的仿真
MIT Nonlinear System 生肉
柴天佑《自适应控制》课程
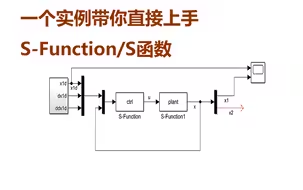
S-Function/S函数,一个实例带你直接上手(非线性反步法搭建)
基于RBF神经网络的自适应控制器simulink建模与仿真
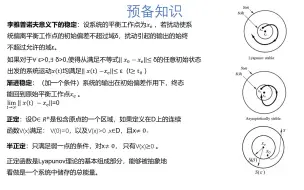
非线性自适应控制预备知识(Lyapunov稳定性)
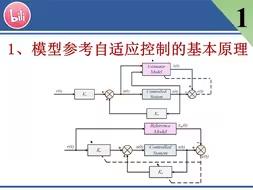
1、模型参考自适应控制的基本原理(直接模型参考自适应控制与间接模型参考自适应控制的比较)
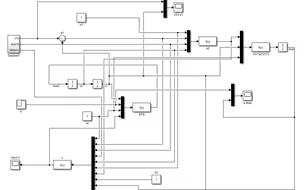
非线性自适应控制器的建模以及MATLAB/Simulink仿真
8、自适应鲁棒滑模控制原理
番外篇:backstepping自适应反步法1
【Brian Douglas】自适应控制基础:什么是模型参考自适应控制?
非线性控制理论(2022春) 1-1 Introduction
DR_CAN博士——非线性系统自适应控制,a_hat的推导过程
非线性反步法、自适应控制器以及simulink仿真(讲解细致,超容易理解,小刻都听得懂doge)
【手把手建模】一起做一个基于MATLAB/Simulink的非线性自适应控制器吧!
1、滑模控制的基本原理
【系统辨识与自适应控制】模型参考自适应控制(MIT-MRAC)理论及其MATLAB实现
【自适应控制】极点配置自校正PID控制算法理论及其Matlab实现
【Matlab】控制算法——自适应控制
三阶参考模型自适应控制仿真实现
飞行器控制-自适应控制与PID效果对比
Matlab和控制理论(二十二)反步法设计心得要点
非线性控制理论(浙大)
【自适应控制】Lyapunov-MRAC算法理论及其Matlab实现
基于参数估计误差的自适应控制:理论及应用
【机器人控制】模糊模型参考自适应控制
鲁棒控制2021版
模型参考自适应控制讲解 MRAC
【Advanced控制理论】12_非线性理论基础_Lyapunov直接方法
手把手教你在Simulink中实现滑模控制系统搭建——从物理模型到滑模控制器到Simulink实现(简单案例,详细操作)
PID都会了吧,那试着做个预设性能PID咯,论文浅说《四旋翼无人机预设性能自适应PID控制》
【自动控制原理】6_比例积分控制器_PI控制
Adaptive Control and Reinforcement Learning (Fall 2020)
【卡尔曼滤波器】1_递归算法_Recursive Processing