V
主页
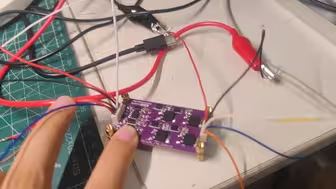
科技与狠活32:挂在闲鱼上的繁星,今天拿出来跑跑PID和霍尔位置检测,时隔三年了,这款2对极电机,用在FOC像素控制不行,原因是霍尔检测精度不高。明天继续吃灰吧
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
【自制】STM32无刷电机FOC驱动一体板---无刷电机能放歌?
科技与狠活30:连肝两周,软硬件全可控,终于解决FOC闭环控制算法,航模电机也能实现大电流控制,还是闭环控制更加的健壮,发热少,振动少,最终效果呈现
科技与狠活25: FOC全新方案优化设计完成,真正的英飞凌三相全桥逆变电路,全并联,小巧精致,满足小功率场景,用在dummy机械臂不错
给我一个外形尺寸给你做一台新平面电机
科技与狠活系列9:自制ARM最强板卡STM32 H743IIT6,集高级功能于一体,让SDRAM实现32M内存扩展,效果很棒
科技与狠活29:基于FOC开环速度算法,控制三相无刷电机效果展示,整体还行,存疑最大算法限制电压超过2V电机抖动严重,可能和电机本身有关系,应该和驱动关系不大
FOC磁定向矢量控制到底什么波形,实测呈现,后续需要进一步把硬件优化下,对无刷电机得控制,还是有点兴趣
【教学片】"进来学电机!" 《直流电机》 - 美国陆军教学片(1961)
科技与狠活23:FOC全国产MOS并联实现3相全桥逆变电路实验效果,无刷电机控制驱动板初步验证OK,不过V相存在尖峰,正在优化中
科技与狠活15:基于英飞凌MOS管实现全桥逆变,懂得人都懂,明天测试正常后,准备再加一相,通过电流采样电路,最终实现SVPWM算法像素级矢量控制
三相直流无刷电机驱动芯片!
科技与狠活0:重新优化,稚晖君DUMMY核心硬件手动焊接,调试,问题定位,解决,给你一个详细的硬件调试指南 。硬件告一段落,开启下一段
科技与狠活24: 书接上回,FOC矢量控制完美的波形已经产生,三相MOS驱动逆变控制测试接近预期,尖峰问题已经定位解决,记录下
科技与狠活4: Dummy核心板,驱动板手搓后,系统调试问题说明,避坑指南,最新硬件优化
【电机教程】100集(全)从零开始学电机基础(2024新手入门实用版),目前B站最完整的电机专题精讲教程,机械设计零基础入门教程!!
稚晖君Dummy复刻换上钢板,机械臂终于有了她该有的样子,前前后后一顿折腾,有了更多扩展的可能
22个闲鱼问题,20分钟详细解答,附解决方案
科技与狠活20:矢量控制算法FOC之PID速度环惯性模式演示,之后关于FOC实验先告一段落了,回顾职场过往经历,聊聊未来计划,开始下一阶段挑战
先逐步把关节电机搞定,机器人组装第一步,稚晖君机械臂复刻还有漫长的路要走
30秒告诉你直流电如何变成交流电
【25工训】【物流小车】【电机控制】太强了!这车太无敌辣!!!
科技与狠活19:忍不住快速讲讲三相MOS FOC磁场定向控制算法疑难点,讲着都难,还是分享下我推公式的总结吧,实在没法从头说,有问题评论区见吧
科技与狠活5:Dummy真小白组装避坑说明,电机径向磁铁,减速器,相位接线,问题一个不能少,小白必踩坑
【电机教程】从零开始学电机基础(2024新手入门实用版),目前B站最完整的电机专题精讲教程,机械设计零基础入门教程!!
科技与狠活3: 手工活,带你走进详细的手搓贴片,虽然曲折,好歹dummy机械臂驱动,控制均正常
信号线要远离干扰源
钢网,小焊台,听锡融化的声音,42电机驱动FOC控制板
科技与狠活28: 全新节点,Dummy机械臂与自适应夹爪即将进入软硬件整合阶段,目前三相电机FOC控制+驱动系统调试完毕,SVPWM开环速度控制算法完成
科技与狠活14:加完钢板,Dummy运动效果还行,实锤稚晖君DH参数是没问题的,时间允许给大家讲讲DH参数,真核心
瑞芯微最强MPU RK3588, 效果还是刚刚的,做视觉够不够?8核,NPU 万亿算力
不到一个小时就能学完所有的电机知识
电控嵌入式培训第五课——简单电机控制
科技与狠活18:三相MOS FOC矢量控制算法,实现旋钮开关的实验效果展示,没想到PID参数非常重要,成了成功失败的关键之关键。记录下
编码器的工作原理是什么?10分钟带你吃透电机编码器!
科技与狠活16:MOS全桥逆变电路测试波形正常,符合技术预期,技术版图即将收敛,下一步三相SVPWM算法即将开启
科技与狠活1:有点坑,还是说明一下,dummy复刻没那么简单,42电机驱动说明下潜在问题
用4年时间,从新手起步到40+店群。一路摸索闲鱼无货源电商,边学变卖,从一筹莫展到渐入佳境,你们会的坑我都踩过,还没踩的,我帮你避开。
当哈工大博士来讲解伺服电机知识
2024年闲鱼无货源电商,一个视频讲明白如何轻松上手,新手从0-1全攻略!
科技与狠活26:三相英飞凌MOS SVPWM波形驱动测试,8.2KHZ驱动测试效果呈现,波形完美,这块板子设计目前都正常,半个月的努力没有白费