V
主页
京东 11.11 红包
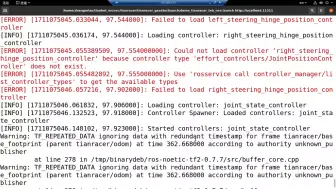
蓝桥ROS-差速巡线机器人设计-良好(80+)的报告-复现
发布人
蓝桥ROS-差速巡线机器人设计-良好(80+)的报告-复现 蓝桥ROS-差速巡线机器人设计-良好(80+)的报告-复现
打开封面
下载高清视频
观看高清视频
视频下载器
ROS机器人虚拟仿真挑战赛rviz和gazebo
Autoware和ROS2课程讲座1 开发环境
EMO桌面宠物机器人开箱试玩
蓝桥ROS云课一键配置f1tenth和PID绕圈(竞赛更新版)
Emo机器人最新演示与Cozmo和Vector机器人对比
如何安装和更新机器人操作系统(ROS-Windows)
蓝桥云课ROS能结合V-Rep进行自动驾驶仿真演示?
机器人实践课程镜像设计与使用-ROS2Go-
ROS机器人虚拟仿真挑战赛时间98秒总分65分
蓝桥ROS密钥更新和使用catkin build
ROS 2和Gazebo 9中mobot多机器人图书馆环境仿真案例
Autoware和ROS2课程讲座3 ROS2工具
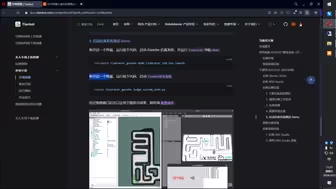
蓝桥ROS云课→一键配置←f1tenth和PID绕圈
蓝桥ROS更新或安装报错key密钥不正确
使用 Autoware ROS 2 CycloneDDS 实现高速自动驾驶
ROS机器人虚拟仿真挑战赛rviz跟随base_link视角
ROS机器人虚拟仿真挑战赛本地电脑环境配置记录
ROS2和Gazebo9中mobot速度发布和坐标订阅
ROS-Industrial开源项目10年混剪
彩色的Hello World到彩色的Donuts甜甜圈-蓝桥ROS云课-C++案例
服务型移动机器人如何实现室内路径全覆盖清扫给你一个清爽干净的家(调试完整版记录)
ROS自平衡机器人仿真(机器人操作系统+现代控制理论融合案例)
五类机器人学或ROS教学中最常见的错误
从快递机器人到元宇宙
Autoware和ROS2课程讲座2 ROS2基础
ROS机器人虚拟仿真挑战赛本地电脑环境配置测试
全开源的ROS2SLAM机器人 ROSBOT - ROS2 open source SLAM robot
如何删除机器人操作系统(ROS-Windows)
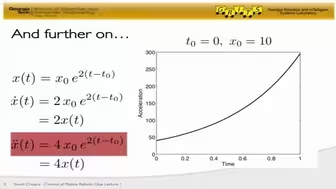
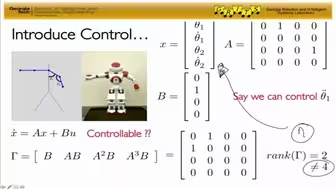
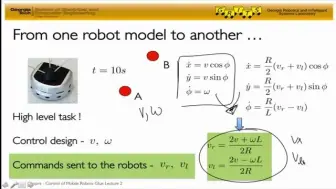
移动机器人控制系列讲座GIT (1)
云课五分钟-02第一个代码复现-终端甜甜圈C++
机器人操作系统云端实践平台设计与使用-实验楼ROS-
移动机器人控制系列讲座GIT (4)
移动机器人控制系列讲座GIT (2)
移动机器人控制系列讲座GIT (3)
移动机器人控制系列讲座GIT (7)
移动机器人控制系列讲座GIT (5)
ROS2趣味题库之turtlesim魔幻步伐(轨迹类题型)(轨迹清晰)
云课五分钟-03第一个开源游戏复现-贪吃蛇
云技术在未来机器人学的应用 The Role of the Cloud in the Future of Robotics
ROS机器人虚拟仿真挑战赛本地电脑环境配置个人问题汇总