V
主页
京东 11.11 红包
蓝桥云课ROS能结合V-Rep进行自动驾驶仿真演示?
发布人
蓝桥云课ROS能结合V-Rep进行自动驾驶仿真演示?
打开封面
下载高清视频
观看高清视频
视频下载器
Autoware和ROS2课程讲座1 开发环境
Airsim仿真效果演示(转)
ROS机器人虚拟仿真挑战赛rviz和gazebo
蓝桥ROS云课→一键配置←f1tenth和PID绕圈
ROS自平衡机器人仿真(机器人操作系统+现代控制理论融合案例)
如何安装和更新机器人操作系统(ROS-Windows)
ROS机器人虚拟仿真挑战赛时间98秒总分65分
如何将蓝桥云课ROS中基于Arduino开发的程序下载到开发板
蓝桥ROS更新或安装报错key密钥不正确
蓝桥云课v-rep_pro_edu_v3_6_2思考题手机遥控机器人案例
ROS机器人虚拟仿真挑战赛rviz跟随base_link视角
使用 Autoware ROS 2 CycloneDDS 实现高速自动驾驶
自动驾驶仿真和演示Apex.Autonomy 1.2
ROS机器人虚拟仿真挑战赛本地电脑环境配置记录
十分钟到底能不能讲明白ROS到底能做啥
自动驾驶赛车和狗狗们的故事
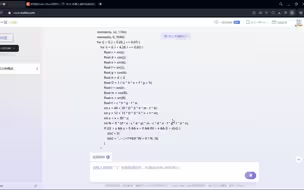
云课五分钟-04一段代码学习-大模型分析C++
Autoware和ROS2课程讲座3 ROS2工具
云课五分钟-0B快速排序C++示例代码-注释和编译指令参数-std=c++11
云课五分钟-06一段代码调试debug-AI与人工
ROS2和Gazebo9中mobot跑道环境仿真测试
云课五分钟-07安装Opera失败-版本不匹配
SLAM 仿真测试录屏 配置环境 Gazebo Harmonic ROS Jazzy
云课五分钟-05一段代码修改-AI修改C++
云课五分钟-02第一个代码复现-终端甜甜圈C++
云课五分钟-0Dcmake默认版本和升级-pip更新方式
云课五分钟-0E下载和安装arduinoIDE-默认库和官网软件的差异
云课五分钟-08安装Opera成功-仓库中查找对应版本
五类机器人学或ROS教学中最常见的错误
机器人操作系统云端实践平台设计与使用-实验楼ROS-
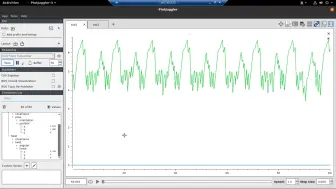
ROS机器人虚拟仿真挑战赛快速跑圈“示波器”
ROS和ROS2借助智能大模型的学习和研究方法
Autoware和ROS2课程讲座2 ROS2基础
tianbot_mini导航测试(ROS+SLAM+Navigation)
如何删除机器人操作系统(ROS-Windows)
ROS机器人虚拟仿真挑战赛本地电脑环境配置个人问题汇总
CARLA自动驾驶排行榜
云课五分钟-Arduino wokwi和步进电机实验报告快速撰写
ROS2趣味题库之turtlesim魔幻步伐(轨迹类题型)轨迹不清晰
ROS2_ESP32_cmdvel