V
主页
弋力 仿真驱动的开放世界具身感知与交互
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
陈立 端到端自动驾驶
上海2024 端到端具身智能体技术研讨会 | 面向自动驾驶仿真的数字孪生世界建模与生成(王申龙)
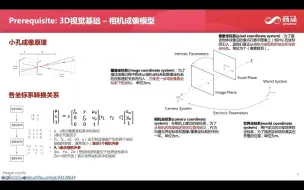
李天羽 自动驾驶场景的三维重建
前方高能,这27个变态AI,一定要偷偷用起来!
上海2024 端到端具身智能体技术研讨会 | 基于视觉的机器人定位导航与控制(王贺升)
上海2024 端到端具身智能体技术研讨会 | 圆桌与辩论
杨泽同 生成式世界模型概述
上海2024 端到端具身智能体技术研讨会 | 面向自动驾驶的写实可控视觉仿真(廖依伊)
陈少宇 端到端建图与规划的研究与落地实践
听说听懂的人已经疯了,量子纠缠的真相竟是世界是虚拟的
上海2024 端到端具身智能体技术研讨会 | 视觉语言大模型与自动驾驶(赵行)
北京2023 自动驾驶论坛|Keynote 2:Sparse Feature Map based Super Long Range BEV Perception
CVPR24 Tutorial | Deva Ramanan: Learning to Plan in A Reactive World
上海2024 端到端具身智能体技术研讨会 | 生成我们的数字未来(虞晶怡)
一口气入门2024最好用的六大AI视频工具!免费且强大!
CVPR24 Tutorial | Kristen Grauman: Ego(-Exo)4D
上海2024 端到端具身智能体技术研讨会 | 颁奖典礼
上海2024 端到端具身智能体技术研讨会 | 比赛方案分享Part2
上海端到端具身智能体技术讲习班 | 致辞
王文海 InternVL1.5
上海2024 端到端具身智能体技术研讨会 | 比赛方案分享Part1
上海2024 端到端具身智能体技术研讨会 | 开场致辞(乔宇)
李志琦 BEVFormer: Looking back and looking forward
CVPR24 FM4AS | Welcome and Opening Remarks
CVPR24 FM4AS | Ted Xiao: What's Missing for Robotics-first Foundation Models?
11月份Chatgpt最新版免费使用!免翻,0门槛,Gpt-4o超多功能已经无敌~现在点进来就可以体验免费GPT!
蔡盼盼 自动驾驶决策规划
原来机器人中也有“人贩子”一个机器人拐跑一大批机器人 #智能机器人 #智能AI #离谱
北京2023 自动驾驶论坛|Keynote 5: Object-Centric Perception for Autonomous Driving
CVPR24 FM4AS | Sherry Yang: Foundation Models as Real-World Simulators
学术 | 面向量产的3D目标与车道线检测
北京2023 自动驾驶论坛|Track1 & Track2 Award Ceremony
ICLR23 SR4AD-02 Scene Understanding beyond the Visible(Hang Qiu)
北京2023 自动驾驶论坛|Keynote 4: Planning-oriented Autonomous Driving
ICLR23 SR4AD-09 Optimizing Internal Network Representations(Christos Sakaridis)
ICLR23 SR4AD-08 Contributions
Flux微调模型终极对比:PixelWave, Shuttle 3 Diffusion, StoiqoNewreality, FluxRealistic
CVPR24 FM4AS | Andrei Bursuc: Foundation Models in the Automotive Industry
北京2023 自动驾驶论坛|辩论:群“模”乱舞时代下,行业大模型(医疗、驾驶、物流、机器人等)是否要等通用视觉大模型成熟后才能实现?
ICLR23 SR4AD-06 Towards Generative Photorealistic Simulation( Yiyi Liao)