V
主页
上海2024 端到端具身智能体技术研讨会 | 视觉语言大模型与自动驾驶(赵行)
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
陈立 端到端自动驾驶
端到端决策规划现状与挑战--自动驾驶之星第六次活动
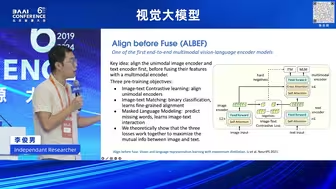
2024北京智源大会-视觉大模型
2024世界人工智能大会(合集)
一文尽览:自动驾驶大语言模型应用综述分享
2024北京智源大会-大模型前沿探索
【迄今为止最先进的模型】多名大佬精讲CLIP、BLIP-2、视觉Agent等多模态大模型落地应用!人工智能AI、ChatGPT
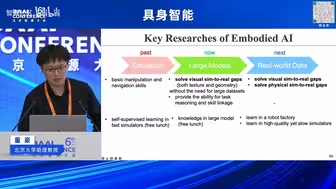
[2024北京智源大会]具身智能
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
上海2024 端到端具身智能体技术研讨会 | 生成我们的数字未来(虞晶怡)
特斯拉的World Model是什么?怎么做端到端训练?
分享|UniAD
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
刘浩晨 自动驾驶的预测规划:联合方法与挑战
弋力 仿真驱动的开放世界具身感知与交互
陈少宇 端到端建图与规划的研究与落地实践
CVPR 2024 - 具身智能中的多模态三维感知思考
视觉大模型已出?CV将死?
李天羽 自动驾驶场景的三维重建
上海2024 端到端具身智能体技术研讨会 | 圆桌与辩论
【李宏毅】2024年公认最好的【LLM大模型】教程!大模型入门到进阶,一套全解决!2024生成式人工智慧-附带课件代码
特斯拉又要颠覆行业?详解:什么是「端到端」智能驾驶
【北京大学-董豪】具身智能关键技术研究:操纵、决策、导航 2024.6
【VALSE2024】0505 赵恒爽《APR:视觉基础大模型》
你的具身智能第一课--基础技术路线
上海2024 端到端具身智能体技术研讨会 | 比赛方案分享Part1
Talk | 清华大学交叉信息研究院助理教授赵行:视觉为中心的自动驾驶-BEV感知
LMDrive:大语言模型加持的闭环端到端自动驾驶框架
上海2024 端到端具身智能体技术研讨会 | 面向自动驾驶的写实可控视觉仿真(廖依伊)
上海2024 端到端具身智能体技术研讨会 | 颁奖典礼
具身智能基础技术路线
NVIDIA 自动驾驶实验室|端到端自动驾驶:鸟瞰图(BEV)
【解码端到端】从蔚来算法架构到特斯拉FSD V12技术推演
上海2024 端到端具身智能体技术研讨会 | 开场致辞(乔宇)
蔡盼盼 自动驾驶决策规划
5分钟讲明白自动驾驶端到端,解释为什么华为智驾并不是遥遥领先
上海2024 端到端具身智能体技术研讨会 | 比赛方案分享Part2
【S1E02下】Figure 01背后的具身智能:解析VLM、基础模型、硬件与交互
上海2024 端到端具身智能体技术研讨会 | 基于视觉的机器人定位导航与控制(王贺升)
上海2024 端到端具身智能体技术研讨会 | 面向自动驾驶仿真的数字孪生世界建模与生成(王申龙)