V
主页
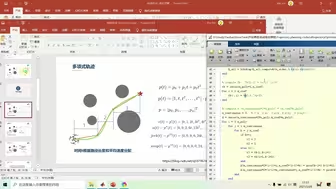
机器人路径规划、轨迹优化课程-第十四讲-基于软约束的轨迹优化原理讲解
发布人
论文还是会放在公众号吧,大家可以从上面下载。 第一次在linux下录视频,结果把笔记本风扇的噪音都录进去了,听到时差点哇的一下哭出来~~,大家将就一下,试了好多办法也去不掉,/(ㄒoㄒ)/~~
打开封面
下载高清视频
观看高清视频
视频下载器
机器人路径规划、轨迹优化课程-第六讲-RRT*算法原理和代码讲解
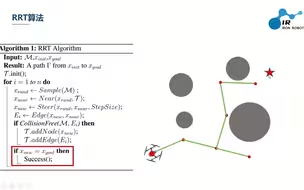
机器人路径规划、轨迹优化课程-第五讲-RRT算法原理和代码讲解
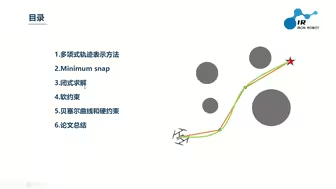
机器人路径规划、轨迹优化课程-第十讲-多项式轨迹与Minimun Snap原理讲解
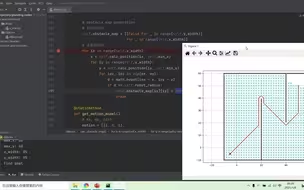
机器人路径规划、轨迹优化课程-第十一讲-Minimum Snap算法代码讲解
机器人路径规划、轨迹优化课程-第二讲-Dijkstra算法原理讲解
机器人路径规划、轨迹优化课程-第三讲-Dijkstra算法代码讲解
机器人路径规划、轨迹优化课程-第七讲-Informed RRT*算法原理和代码讲解
机器人路径规划、轨迹优化课程-第四讲-A*算法原理和代码讲解
机器人路径规划、轨迹优化课程-第十二讲-Minimum Snap闭式求解原理讲解
C6-2智能车的建图与自主实现教程
机器人路径规划、轨迹优化课程-第一讲-轨迹规划导论
机器人路径规划、轨迹优化课程-第十五讲-ROS简介与软约束代码讲解
机器人路径规划、轨迹优化课程-第八讲-基于遗传算法的路径规划算法理论和代码讲解
路径平滑|基于共轭梯度法的轨迹优化(ROS C++/Python)
机器人路径规划、轨迹优化课程-第十六讲-基于贝塞尔曲线与硬约束的轨迹优化方法简介
基于深度学习的无人机轨迹规划论文视频分享
机器人路径规划、轨迹优化课程-第九讲-路径规划算法总结
2025工创赛物流搬运机器人 赛事解读与问题分析2
机器人路径规划、轨迹优化课程-完结撒花
《ROS自主无人机:从理论到实践》首期训练营 自主定位| 场景重建| 规划导航
【开源无人机】Vins_fusion代码讲解
基于搭建的仿真Livox mid360雷达与仿真环境实现LeGO-LOAM
【开源无人机】从零调试一架开源无人机
ROS 颜色目标识别与定位的 Python 实现
《松灵ROS 2开讲啦》第六期 Nav2导航应用
我回来了-软路由RouterOS防火墙规则之“流量转发指定接口”
【汽车】软件定义汽车:基于Simulink开发面向服务的应用
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
基于ros路径规划+避障演示
套件教程-RTABMap之3D雷达定位与导航
自制ros建图导航机器人2
基于yolo和moveit的图像识别机械臂目标抓取搬移
宇树K1机械臂的视觉抓取仿真
机器人路径规划、轨迹优化课程-第十三讲-Minimum Snap闭式求解代码讲解
2025工创赛物流搬运机器人规则分析与备赛计划
图睿轮式人形机器人 | 销售电话18268017403
2025工创赛物流搬运机器人 如何码垛 如何启动 注意什么??
【人形机器人】在Gazebo/Mujoco中的仿真
【开源无人机】4G模块及远程连接使用教程
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具