V
主页
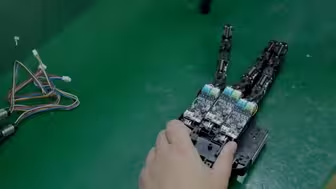
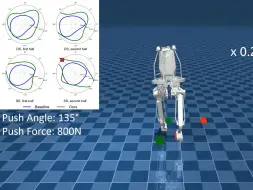
【RSS2023】Rotating without Seeing: Towards In-hand Dexterity through Touch
发布人
website: https://touchdexterity.github.io/ Abstract: Tactile information plays a critical role in human dexterity. It reveals useful contact information that may not be inferred directly from vision. In fact, humans can even perform in-hand dexterous manipulation without using vision. Can we enable the same ability for the multi-finger robot hand? In this paper, we propose to perform in-hand object rotation using only touching without seeing the object. Instead of relying on precise tactile sensing in a small region, we introduce a new system design using dense binary force sensors (touch or no touch) overlaying one side of the whole robot hand (palm, finger links, fingertips). Such a design is low-cost, giving a larger coverage of the object, and minimizing the Sim2Real gap at the same time. We train an in-hand rotation policy using Reinforcement Learning on diverse objects in simulation. Relying on touch-only sensing, we can directly deploy the policy in a real robot hand and rotate novel objects that are not presented in training. Extensive ablations are performed on how tactile information help in-hand manipulation.
打开封面
下载高清视频
观看高清视频
视频下载器
【机器人科学III】让机器人拥有类人触觉感知,哥伦比亚大学机器人实验室最新进展
【up自制开源】30分钟拥有自己的具身智能触觉系统!柔性触觉不再遥不可及
【CORL 2022】DexPoint 基于点云的强化学习策略实现灵巧手操作
用ai喂出来的抽象人类
【RAL2023】Learning Continuous Grasping Function with a Dexterous Hand from Human
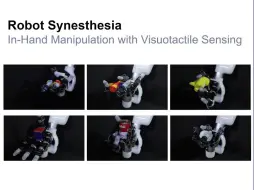
【ICRA2024】Robot Synesthesia In-Hand Manipulation with Visuotactile Sensing
【真机演示】CrossDex:跨具身抓取,用一个策略控制任意的灵巧手
眼观六路 手感八方,机器手识别万物,登Science子刊封面
【CoRL 2023】大佬吵架现场精彩片段Debate:Is Scaling Enough to Deploy General Purpose Robots
Dobb·E 一个开源的家庭机器人操作臂端到端学习训练框架
机器人有触觉了!Meta机器手史诗进化,多模态操控精度提升94%
6轴机械臂运动学正逆解验证程序,三连留邮箱
Decaying Action Priors for Accelerated Imitation Learning of Torque-Based Legged
CoppliaSim原Vrep4.7.0最新版本导入SW零件和基于python的机械臂仿真和逆运动学IK模块控制
赛博朋克东南大学?“CYBATHLON2024”半机械人仿生奥运会夺冠!全程回顾
端到端机械臂视觉抓取无人配送的场景演示
智能视觉机械臂
如何用706.9元做一个高精度的机械臂?
PEGG-Net Isaac Sim Demo
Vision Pro还能这么玩!VR 双臂遥操作!太酷了!
[搬] 在线 DNN 驱动的非线性 MPC,用于步幅调节的仿人机器人步行
ai永远无法替代ai
【机器人vlog】爆炸与暴雨 | ding我在浙大的最后一周 | 心碎时刻
力反馈手套在遥操作方案中的应用
艺术机械臂解决方案
音乐恐怖,吓倒Spot狗狗了 波士顿动力 万圣节
【CoRL2023】机器人顶会大佬吵架精彩片段2:Ingredients of Deploying Learning-Based Robotic Systems
《关于大一新生做的抓取物体机械臂这档事》
【Actuate 2024】中文字幕|机器人基础模型 - Robotic Foundation Models|Sergey Levine
Humanoid Self-Collision Avoidance Using Whole-Body Control with CBF
使用ROS2-Control + RL来控制四足机器人
【揭秘】五指灵巧手DexHand021 产线组装的秘密
波士顿动力 Spot 足臂协同操作
【机器人科学III】探访美国名校Robotics教授,机器人进入千家万户究竟 缺点什么?
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
【WowRobo具身智能100个实用场景-1】一份麦当劳早餐带来的灵感
最新视频 波士顿动力 Atlas 万圣节
【CoRL 2024论文】比Vision Pro更高效生成数据的远程操作系统
【机器人科学ii】如何把自己输入计算机虚拟世界?科技拼图正悄悄形成| 南加大图形学博士硬核解析
【机器人科学II】跑酷机器人背后你所不知道的技术细节 | 波士顿动力类人机器人Atlas | 军事?家政?护理?