V
主页
【机器人科学III】让机器人拥有类人触觉感知,哥伦比亚大学机器人实验室最新进展
发布人
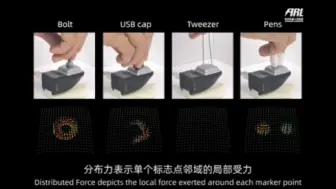
up主耗时一年的作品!请大家多多带点赞! 网址:https://binghao-huang.github.io/3D-ViTac/ 简介:触觉和视觉感知对于人类进行精细的环境互动至关重要。为机器人开发类似的多模态感知能力,可以显著提升并扩展它们的操作技能。本文介绍了3D-ViTac,一种专为灵巧的双手操作设计的多模态感知和学习系统。我们的系统配备了具有密集感知单元的触觉传感器,每个单元覆盖3平方毫米的区域。这些传感器成本低且灵活,能够提供详细且广泛的物理接触信息,有效地补充了视觉信息。为了整合触觉和视觉数据,我们将它们融合到一个统一的三维表示空间中,以保留它们的三维结构和空间关系。该多模态表示可以与扩散策略结合,用于模仿学习。通过具体的硬件实验,我们证明,即使是低成本的机器人也能够实现精确操作,并且在处理易碎物品的安全交互和执行涉及手内操作的长时间任务中,明显优于仅靠视觉的策略。
打开封面
下载高清视频
观看高清视频
视频下载器
【硬核】实验室自制多模态视触觉传感器
很多研究人员都放弃具身智能了
【up自制开源】30分钟拥有自己的具身智能触觉系统!柔性触觉不再遥不可及
北京籍前华为首名女黑客瑾瑾 在b站坚持直播编程到凌晨 饿了就吃点泡面 可直播间却迟迟没人观看
【机器人科学II】佩戴机械“第六指”,竟反过来改变人脑?| 运动增强+SRL技术 | 人体增强设备重大学术突破
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
Vision Pro还能这么玩!VR 双臂遥操作!太酷了!
Tac3d 传感器 可测触觉六维力及触力形貌及分布,类gelsight
近日人形机器人发布密集,波士顿动力终于不忍了,出手就是高水平
《机器人触觉与灵巧操作入门》全网首门机器触觉系统性课程 灵巧手| 入门教学【课程试看】
【机器人科学III】探访美国名校Robotics教授,机器人进入千家万户究竟 缺点什么?
【CoRL2023】机器人顶会大佬吵架精彩片段2:Ingredients of Deploying Learning-Based Robotic Systems
李飞飞团队佳作不断:聚焦机器人抓取交互,让机器人操作真正地适应各种环境
【波士顿动力】Atlas崩溃锦集 | 不要害怕失败,失败的实验同样会对研究带来意义 甚至更大
【ICRA2024】Robot Synesthesia In-Hand Manipulation with Visuotactile Sensing
19自由度视触觉灵巧手
【CORL 2022】DexPoint 基于点云的强化学习策略实现灵巧手操作
【机器人科学ii】软体机器人前沿进展分析|白细胞仿生的人工触手肌肉
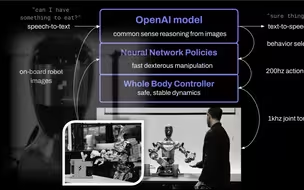
OpenAI联手Figure1历史全回顾(附末尾原理解析),做robotics的你破防了吗?
你的具身智能第一课--基础技术路线
【CoRL 2023】大佬吵架现场精彩片段Debate:Is Scaling Enough to Deploy General Purpose Robots
【SLAM-2024】第五届全国SLAM技术论坛-上海交通大学-卢策吾-具身智能的PIE模式研究
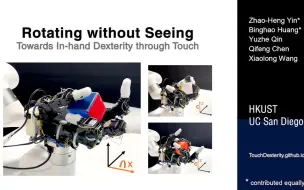
【RSS2023】Rotating without Seeing: Towards In-hand Dexterity through Touch
【RAL2023】Learning Continuous Grasping Function with a Dexterous Hand from Human
最酷人形,我们做到了!
【灵巧智能】首款量产五指灵巧手,全球发售!
【机器人vlog】爆炸与暴雨 | ding我在浙大的最后一周 | 心碎时刻
优雅 这步子走的实在优雅(周润发鼓掌
不可思议的“死锤”,一旦敲下就不会反弹!你知道原理吗?
爬行、攀爬、停栖与飞行:“膜气球”软体机器人 | 2024 新加坡科技设计大学
3.85万人民币
宇树G1再进化,解锁自然行走#宇树机器人#人形机器人#人工智能
2天学会,仿人自然行走
【北京大学-董豪】具身智能技术趋势分析 2024.8
具身智能基础技术路线
【CoRL2023】 Dynamic Handover: Throw and Catch with Bimanual Hands
实在是妙,机器人又何必非得要像人
众擎SE01自然步态行走日常调试花絮
甲骨文CEO 谈AI:“1000 亿美元”是入场费,甲骨文已经开始建三个核反应堆来给数据中心供电了!
【自制】耗时三个月,我做了一个优雅的多功能调试器