V
主页
京东 11.11 红包
Decaying Action Priors for Accelerated Imitation Learning of Torque-Based Legged
发布人
https://www.youtube.com/watch?v=O1lcry7sHNQ DecAP: Decaying Action Priors for Accelerated Imitation Learning of Torque-Based Legged Locomotion Policies Shivam Sood, Ge Sun, Peizhuo Li, Guillaume Sartoretti Optimal Control for legged robots has gone through a paradigm shift from position-based to torque-based control, owing to the latter's compliant and robust nature. In parallel to this shift, the community has also turned to Deep Reinforcement Learning (DRL) as a promising approach to directly learn locomotion policies for complex real-life tasks. However, most end-to-end DRL approaches still operate in position space, mainly because learning in torque space is often sample-inefficient and does not consistently converge to natural gaits. To address these challenges, we propose a two-stage framework. In the first stage, we generate our own imitation data by training a position-based policy, eliminating the need for expert knowledge to design optimal controllers. The second stage incorporates decaying action priors, a novel method to enhance the exploration of torque-based policies aided by imitation rewards. We show that our approach consistently outperforms imitation learning alone and is robust to scaling these rewards from 0.1x to 10x. We further validate the benefits of torque control by comparing the robustness of a position-based policy to a position-assisted torque-based policy on a quadruped (Unitree Go1) without any domain randomization in the form of external disturbances during training. https://arxiv.org/abs/2310.05714
打开封面
下载高清视频
观看高清视频
视频下载器
22年跑的legged_control 现在看依旧炸裂
【Python】人形机器人——全身控制
Agile Continuous Jumping in Discontinuous Terrains
众擎SE01自然步态行走日常调试花絮
沼泽小狗 机器狗 Ghost V60
这国产机器人又有新绝招,让马斯克看了都得破防。
最新视频 波士顿动力 Atlas 万圣节
Combining Learning-Based Locomotion with Model-Based Manipulation for Legged
双足机器人步态生成 MATLAB and Simulink
【RAIL】中文字幕|Octo:An Open-Source Generalist Robot Policy
终于可以站起来了,就是lstm训练的慢了好多…
四足机器人足臂协同 ocs2 qm_control 开源项目学习
走路最像人的国产机器人,真的是一股子人味。
MPC+强化学习!Actor Critic模型预测控制,苏黎世大牛教授人类水平性能的自主视觉无人机演讲
How to design nonlinear MPC with deep learning prediction model
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
SOTA ! 浙大最新成果!四足强化学习走梅花桩!
人形机器人足底机械结构设计
上电驱?波士顿动力Atlas向液压说再见?不会再爱了!
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric WBC
MPC and RL, two different roads to legged locomotion, and that's OK
(ICRA 2024)Contrastive Initial State Buffer for Reinforcement Learning
Semantic Traversability Estimation Using Pose Projected Feature
音乐恐怖,吓倒Spot狗狗了 波士顿动力 万圣节
人形机器人量产临近,深度梳理5家核心公司
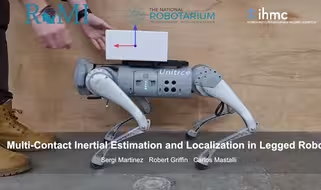
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
全球最强的10个人形机器人,第二名来自中国?宅男见到后想生孩子!能生孩子的机器人女友还有多远?
[旋转 跳跃 后空翻] 四足/人形机器人的分阶段奖励塑造:一种受约束的多目标 RL 方法 | 开源代码在简介
MuJoCo 仿真 案例欣赏
清华教授刘嘉谈中美AI差距:可怕的是我们落后速度在加快
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
强化学习四足机器人一
Diffusion-based Path Planner for Synthesizing Trajectories Applied on Quadruped
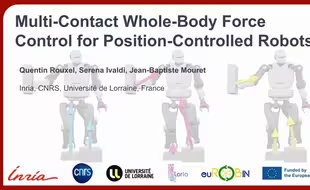
有开源github代码! RA-L论文 人形机器人的多接触全身控制
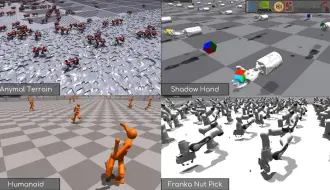
Scaling Population-Based Reinforcement Learning with GPU Accelerated Simulation