V
主页
如何写机器人的 PID 控制-平衡、循线
发布人
https://www.youtube.com/watch?v=dynSWBXu9aA
打开封面
下载高清视频
观看高清视频
视频下载器
力矩陀螺 自平衡装置
详细看看这个轮子的内部结构
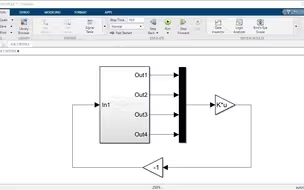
matlab动力学建模与simscape验证
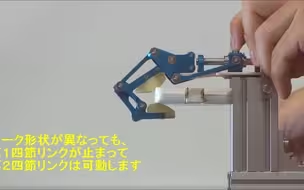
D-Hand 複合四節リンク機構 | ダブル技研株式会社
Gazebo中的板球平衡系统
【开源】连续型手术机器人
做机器人有必要了解下这种机构
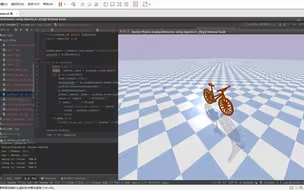
自平衡自行车/还有个可爱的脚撑!!!
用ROS搭建一台自平衡机器人
PyBullet 深度强化学习 自平衡仿真
开源四足机器人
pybullet-bike 监督学习实现平衡
行走机构
折纸机构应用前景还是不错的
LQR倒立摆 从建模到控制 零基础都能复现
ROS+OpenAI(11)基础7-tf2坐标变换与四元数
如何快速低成本开展机器人项目
软体机器人 现在都整咋样了
能爬墙的遥控赛车,制作全过程
虚拟球铰 组合成的 机械臂
Insectlike robots 仿生昆虫机器人
arduino官方自平衡自行车资料解读(1)套件组成与软件环境安装
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
全网首发—清晰介绍关于如何制作轮腿机器人(平衡步兵)的知识学习清单
破解肢体语言的秘密,用于机器人技术
机械专业的同学 值得一看 很不错的动画
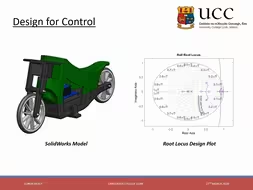
UCC的自平衡摩托
手把手教你做六足机器人!
遥控机器人-这犀利的眼神
MIT的变形机器人
同学,这里不能睡觉!
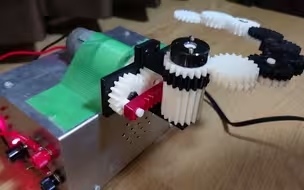
这个“齿轮摆尾”机构 值不值一个卧槽
2自由度机构
7款 变形机器人
自平衡自行车SKATACROSS
国内首个大尺寸-仿鸵鸟双足机器人
NASA 张拉机构 概念动画 Tensegrity Rover
一个车轮要如何跳起来?
ros+openai(3)本地安装
一些机构动画展示