V
主页
ROS+OpenAI(11)基础7-tf2坐标变换与四元数
发布人
ROS+OpenAI(11)基础7-tf2坐标变换与四元数,欢迎观看,谢谢支持!
打开封面
下载高清视频
观看高清视频
视频下载器
ros+openai(6)基础2
ros+openai(3)本地安装
ROS+OpenAI(8)基础4-动作
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
ROS+OpenAI(10)基础6-ROS时间
ROS+OpenAI(15)ROS-control
ros+openai(2)虚拟机演示
ROS+OpenAI(13)urdf进阶-xacro
Gazebo中的板球平衡系统
机器人竞赛基础技术讲解(2)-9月18日
强化学习 四足
ROS+OpenAI(12)基础8-数据记录与导出
解读设计优异的机械臂
如何快速低成本开展机器人项目
ROS Robotics Tutorials _ Robot Operating System
分享几个ROS简单的脚本
ROS+OPENAI(4-4)多机器人简单示例
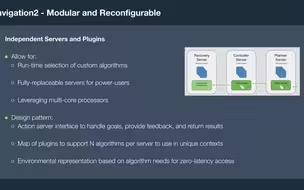
The Marathon 2_ A Navigation System (IROS 2020)
CoRL 2020, Spotlight Talk 130_ Motion Planner Augmented RL
强化学习在lego上的部署
机器人竞赛基础技术讲解(1)-9月13日
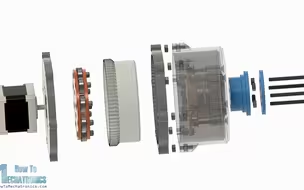
一个视频搞懂谐波减速器,学机器人必备
强化学习 之 机器人穿T恤
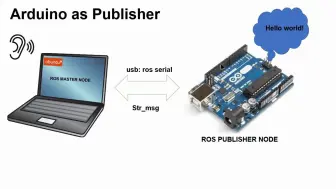
ROS Arduino tutorials _ ROS Arduino serial communication example - Part 2
ORB-SLAM2实操难吗
OpenAI Baselines - Reinforcement Learning Agents!
MIT的变形机器人
ROS多线程 与 Linux进程(1)
arduino官方自平衡自行车资料解读(5)理论-仿真-实践
行走机构
Insectlike robots 仿生昆虫机器人
如何用强化学习来训练机器人
做机器人有必要了解下这种机构
PyRoboLearn_ Kinematics
Real-time Active Vision for a Humanoid Soccer Robot Using DRL
【开源无人机】从零调试一架开源无人机
折纸机构应用前景还是不错的
OpenAI o1-mini模型解析:STEM领域的高效推理与模型局限
室外ROS 深夜调车,一鼓作寄
Setting up Arduino lib in ROS & Arduino IDE