V
主页
【PX4开源飞控无人机】入门教学:在MacOS上安装搭建PX4开发环境 | Brian Philips
发布人
【PX4开源飞控无人机】入门教学:在MacOS上安装搭建PX4开发环境 购买官方Pixhawk硬件:https://item.taobao.com/item.htm?id=569286312095
打开封面
下载高清视频
观看高清视频
视频下载器
【ArduPilot开源飞控】EFK更新 | EFK2/EKF3作者Paul Riseborough讲解 | 2020年ArduPilot线上开发者大会
【无人机】UAVCAN:用于硬实时航空器网络的高可靠发布订阅协议 | 由Pavel Kirienko和Scott Dixon讲解 | PX4开发者峰会2019
【思动学院】VMware虚拟机Ubuntu/Linux系统满帧率运行Gazebo仿真 | PX4入门之开发环境搭建视频教学
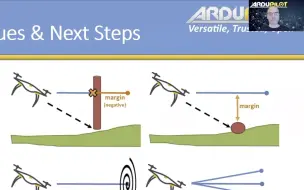
【ArduPilot开源飞控】物体躲避更新 | 核心开发者Randy Mackay讲解 | 2020年ArduPilot线上开发者大会
【研讨会】PX4开源无人机介绍与入门 | SITL仿真与MAVSDK演示 | Arm Innovation Coffee
【ArduPilot开源飞控】直升机更新 | 由直升机维护者Bill Geyer讲解 | 2020年ArduPilot线上开发者大会
【PX4开源飞控无人机】MAVSDK与软件在环仿真(SITL)入门教学 | AmadorUAVs | 官方教程系列
超浪漫的Python粒子圣诞树 快给身边的朋友安排上吧!!!!(附源码)
【PX4开源飞控无人机】MAVROS Python使用教程(二):通过一段代码执行简易任务与指引飞行 | Farhang Naderi
【开源无人机】S2无人机桥梁巡检
【无人机】使用MAVSDK通过MAVLink控制无人机 | 由MAVSDK维护者Jonas Vautherin讲解 | PX4开发者峰会@ETH苏黎世联邦理工
【开源飞控无人机】控制分配:重构PX4混控系统 | Julien Lecoeur & Silvan Fuhrer | PX4线上开发者峰会2020·直播录像
【开源无人机】室内款低成本无人机M0-F250介绍及代码讲解(源码资源链接在简介)
【开源无人船】从零组装一艘测绘无人船
【PX4开源无人机】UAVCAN | Pavel Kirienko | PX4线上开发者峰会2020
【ArduPilot开源飞控】Lua脚本 | 由Michael duBreuil讲解 | 2020年ArduPilot线上开发者大会
【PX4开源飞控无人机】多旋翼控制原理概述 从传感器到动力输出 | 两位Auterion工程师主讲 | PX4线上开发者峰会2020·直播录像
【PX4开源无人机】软件在环仿真(SITL)的配置和开发流程 | Jaeyoung Lim | PX4线上开发者峰会2020
【开源无人机】飞控通过4G连接地面站教程
【PX4开源飞控无人机】为MAVSDK扩展新特性 | MAVSDK维护者Jonas Vautherin | PX4线上开发者峰会2020·直播录像
【ArduPilot开源飞控】OpenTX Lua数传与FrSky回传库| @yaapu Alex Apostoli | 2020年ArduPilot开发者大会
控制系统的串联校正的本质解析(原理层面解析,学了不忘)
用MP和最新的ArduPilot固件为Pixhawk等兼容飞控升级ChibiOS Bootloader 由ArduCopter作者Randy演示
【开源无人机】从零搭建无人机集群通信网络(基于wifi)
Auterion发布Skynode飞控机载计算机一体机 | 让企业级无人机开发更轻松
低成本超小自主飞行无人机,开导!
[视频教学] 快速实现 PX4 Offboard 模式飞行以及 Gazebo 仿真 | 无人机自动驾驶GAAS 01
【PX4开源无人机】航空机器人在高风险环境的自主路径规划 | Tung Dang | PX4线上开发者峰会2020
PX4防撞功能(Collision Prevention)视频演示
【PX4开源飞控无人机】超视距无人机的软件和工业标准的未来 | James Howard | PX4线上开发者峰会2020·直播录像
【PX4开源飞控无人机】事件驱动的自主飞行之路(三个思路) | Ram Grandhi & Deepak Singh | PX4线上开发者峰会2020·直播录像
【PX4开源飞控无人机】将PX4用于教育卫星:CanSats | Abhas Maskey | PX4线上开发者峰会2020·直播录像
【ArduPilot开源飞控】文档规划 | 由Wiki团队Henry Wurzburg讲解 | 2020年ArduPilot线上开发者大会
【PX4开源无人机】纯硬件仿真(SIH)低成本硬实时的HITL | Romain Chiappinelli | PX4线上开发者峰会2020
【FPV穿越机电调】BLHeli_32完全解读12P | 由Joshua Bardwell与Ryan Harrell讲解
ArduPilot UnConference 2018 - ArduPilot的底层实时操作系统RTOS即将由NuttX迁移到ChibiOS
【PX4开源飞控无人机】GE的高级载具动力学仿真的开源工作流程 | Matt Vacanti · Jesse Hoskins | PX4线上开发者峰会2020
【DIY开源无人机】Holybro S500 V2套机 | 开箱演示 | 官方推荐Pixhawk 4四轴四旋翼飞行器套件 | 德语
“九天”蜂巢母舰,这样的无人机,你爱了吗?
【PX4开源飞控】独立SoC的开放平台帮助打造高性能AI人工智能无人机 | 96Boards总监Yang Zhang | PX4线上开发者峰会2020·直播录像