V
主页
京东 11.11 红包
SuperPoint+LightGlue在kitti数据集上的实验
发布人
SuperPoint+LightGlue在kitti数据集上的实验,点云为三角化的结果。 匹配成功率肉眼可见的高,而且精度也很高。vo还在开发ing。 github:https://github.com/Nothand0212/super-vio 另一个项目用的是ORB+LK-Flow: github: https://github.com/Nothand0212/lk-vio
打开封面
下载高清视频
观看高清视频
视频下载器
一个简单的vio slam项目(coding)
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
视觉惯导融合SLAM内外参标定是关键
轮式里程计激光里程计视觉里程计区别是什么
强推!【视觉SLAM十四讲】全书讲解!清华大学原著大佬高翔亲授!真的让人醍醐灌顶!——(人工智能、深度学习、神经网络、Pytorch、OpenAI开发者大会)
改进的lio-sam
除了激光SLAM和视觉SLAM还有哪些研究方向
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
SLAM为什么需要IMU
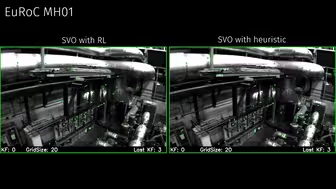
强化学习给视觉里程计自适应调参
三维空间扫描仪 高效率重建古建筑
研究生必知的论文复现:如何跑通官方模型并替换为自己的数据集再跑通?——神经网络|机器学习|深度学习
RTABMAP算法激光视觉融合SLAM
Go2开发教学10-SLAM 导航服务接口
MC-Bench:浙大提出多语境视觉基础任务数据集(今日Arxiv 10月17日)2024年10月17日Arxiv cs.CV发文量约96余篇,减论Agent
SLAM扫描设备产品答疑
浙大章国锋团队最新开源NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限!
多传感器融合SLAM松耦合与紧耦合
使用YOLOV8/V5快速扩充数据集
IROS' 24 开源|GV-Bench:面向长期回环检测的几何验证评估
VINS算法视觉惯导融合SLAM
SLAM扫描设备总结与挑战
SLAM-Viewer,SLAM便捷可视化小工具
ChainSLAM实时建图演示
无人机全新数据集!UAV3D:无人机大规模3D感知基准!收录NeurIPS 2024!
Ultralytics新作-YOLOV11正式发布!自定义数据集训练,从代码下载到实例测试,与YOLOV8对比你需要知道的几点
机器学习与SLAM怎么结合
如何从手持SLAM数据到MESH网格
SLAM算法三小时即可入门!计算机大佬十节课精讲让你从零到一快速掌握SLAM理论及无人驾驶实战!
不要只知道Kaggle和papers with code了!这三个网站简直把数据集的专业性拉满了!!!
SLAM系统的2种设计范式
Meta放大招【AI重建世界】,发布首个最大的高质量3D重建数据集,实现亚毫米级的几何精度和照片级真实感
无GPS也能稳定飞行?阿木SU17视觉定位多场景飞行测试
IROS24:BE-SLAM: BEV-Enhanced Dynamic Semantic SLAM with Static Object Reconstruc
MetaCam EDU 应用案例及效果展示
SLAM为什么需要机器学习
yolo v8训练自定义数据集+labelme打标
一个网站就能找到任何你想要的机器学习和深度学习数据集!建议每一个人都好好收藏!!
SLAM算法为什么需要内存管理机制
这么简单好用的 ROS 定位方法,确定不要试一下吗?!