V
主页
浙大章国锋团队最新开源NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限!
发布人
NIS-SLAM: Neural Implicit Semantic RGB-D SLAM for 3D Consistent Scene Understanding 论文:https://arxiv.org/pdf/2407.20853 主页:https://zju3dv.github.io/nis_slam/ 翟宏佳 浙江大学计算机辅助设计与图形学系统国家重点实验室在读博士。导师为章国锋教授和鲍虎军教授,研究方向为3D视觉,主要是基于隐式表达的室内场景的重建,定位与理解。 直播大纲 1.个人与实验室简介 2.语义SLAM与隐式SLAM回顾 3.基于神经隐式表达的3D一致语义SLAM 4.讨论交流
打开封面
下载高清视频
观看高清视频
视频下载器
SLAM算法三小时即可入门!计算机大佬十节课精讲让你从零到一快速掌握SLAM理论及无人驾驶实战!
SLAM为什么需要IMU
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
硕士生去搞计算机视觉,是纯纯的脑瘫行为!
腾讯一面:如何快速判断几十亿个数中是否存在某个数?听到这个问题突然愣住了。。
SIGGRAPH 2024 | 上科大开源2DGS!几何精度降维打击3DGS!
transformers一个非常严重的bug——在使用梯度累计的时候 loss不等效
清华硕士8面字节终被拒,网友戏称:“就算是审讯地下党,八轮下去也该招了啊!”法硕备考同样升级打怪,通关秘籍拿走!|25考研|备考经验
ECCV 2024 oral | 首次基于深度聚类的多模态融合里程计网络
FAST-LIVO2: 高效鲁棒的激光雷达-惯性-视觉融合算法,可用于实时高精度三维重建,无人机和机器人在退化场景的机载定位。
【官方双语】我终于有机会尝试网络启动Windows了(赞助)#linus谈科技
70年老算法Dijkstra被证明普遍最优 斩获顶会FOCS 2024最佳论文
李开复透露「GPT5训练遇到困难,O1模型被迫放出来」OpenAI还有很多私货没有发布
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
浙大、上海人工智能实验室等即将开源PGSR: 平面3DGS提升表面几何,超越 2DGS、GOF,实现渲染新高度
【研2基本功 Score-based Diffusion 2】手搓Diffusion SDE,CCF-A向你招手
什么是SLAM
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA(上篇)
性能炸裂!SpectroMotion:唯一一个镜面场景的动态3D重建。
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
你可以在神经网络中玩CSGO
香港科技大学!CVPR&NeurIPS2024开源 | 迈向通用可泛化的自动驾驶世界模型(上篇)
马斯克质疑绝大多数博士学术水平
我是南京航空航天大学的鸿蒙开发者。在开发鸿蒙系统应用的过程中,整个流程感觉特别顺畅,创新点满满,尤其是它“一次开发,多端部署”的特性,真的能为开发者节省很多精…
姚顺雨-语言智能体博士答辩 Language Agents: From Next-Token Prediction to Digital Automation
大模型时代下的端到端自动驾驶(上篇)
AP:宾州2500张选票涉嫌造假 再冲国会山宣称有了
3DGS涨点神器!收录顶会NIPS 2024!3DGS-Enhancer来了!
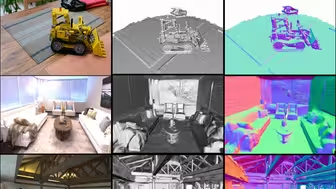
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
NeurlPS'24 开源 | 使用VoxSplats 进行即时大规模场景重建,仅用3张 图像就可在20秒内重建百米大场景
李沐-YOLOv3史上写的最烂的论文-但很work
SLAM-Viewer,SLAM便捷可视化小工具
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
9个报错?但我代码只有8行?
ECCV'24 | Gaussian Grouping解决3DGS的对象级场景理解问题,实现3D场景任意分割和编辑
何教授的法式大餐来了?法国科研人员用磁场从石墨中暴力分离出室温超导颗粒,转变温度高达500-700开尔文!
[3DGS进展] ETH等DepthSplat证明3DGS与深度估计任务是可相互促进提升的,并在多个数据集上同时取得深度估计和NVS任务的SOTA
UCL开源 | Spann3R:基于空间记忆,不估计相机参数也能实时重建(上篇)
中国人要登月了!我国第四批预备航天员将执行载人登月任务