V
主页
京东 11.11 红包
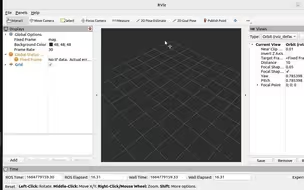
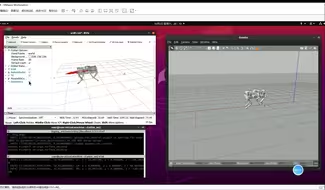
6.2_rviz2基本使用02_插件以及配置文件
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
6.2_rviz2基本使用01_安装、启动以及界面布局
《ROS 2机器人开发从入门到实践》6.4.1安装与使用Gazebo构建世界
《ROS 2机器人开发从入门到实践》6.4.4 使用两轮差速插件控制机器人
ROS控制 | 第一轮导航代码讲解
从Navigation2开始的ROS2生活
硬核+开源 稚晖君Dummy机械臂全新升级谐波无刷电机版 - Dummy2 它来了!😄
未知环境探索——ROS2树莓派小车实时地图构建和导航
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
有电脑就行!三分钟安装 openEuler 操作系统并搭建ROS环境
《ROS 2机器人开发从入门到实践》6.2.6贴合地面,添加虚拟部件
ROS2机器人边建图边导航
SLAM系统的2种设计范式
《ROS 2机器人开发从入门到实践》6.2.2 在RViz中显示机器人
《ROS 2机器人开发从入门到实践》6.4.3 使用Gazebo标签扩展URDF
禁止低效啃书!《清华高翔博士-视觉SLAM14讲》视频教程全集,简直不要太强!
使用ROS2-Control + RL来控制四足机器人
ROS控制 | 第一轮控制功能包讲解
【开源教程】ROS+PX4开源机械臂控制(下)
《ROS 2机器人开发从入门到实践》5.6.2 Git进阶之学会撤销代码
学习小记:如何解决Rviz和Gazebo中机器人运动不同步的问题(Rviz中机器人固定不动的问题)
《ROS 2机器人开发从入门到实践》6.2 使用URDF创建机器人
ROS2理论与实践
1.3.4_ROS2快速体验_运行优化
《ROS 2机器人开发从入门到实践》6.1 机器人建模与仿真概述
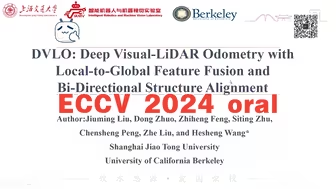
optimization pose and rgb points
1.2.1_ROS2安装_步骤1设置编码
《ROS 2机器人开发从入门到实践》6.4.5 激光雷达传感器仿真
《ROS 2机器人开发从入门到实践》6.2.3使用Xacro简化URDF
ECCV 2024 oral | 首次基于深度聚类的多模态融合里程计网络
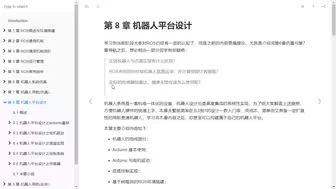
【赵虚左】《ROS理论与实践》第8、9章--ROS机器人操作系统
1.2.2_ROS2安装_测试ROS2
《ROS 2机器人开发从入门到实践》5.6 ROS 2基础之Git进阶
手持旋转扫描仪构图测试(alpha_lidar)
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
《ROS 2机器人开发从入门到实践》6.3.2为机器人部件添加质量与惯性
ROS2机器人多点导航与动态避障
《ROS 2机器人开发从入门到实践》6.2.4创建机器人及传感器部件
3.8.7_期中大作业_参数服务_案例分析
【开源教程】ROS+PX4开源机械臂控制(上)
《ROS 2机器人开发从入门到实践》7.2.2将地图保存为文件