V
主页
京东 11.11 红包
【OCS2】进阶Demo也都迁移到ROS2啦
发布人
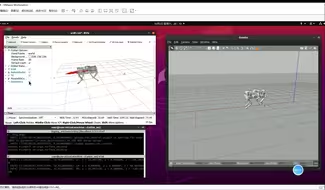
项目Github地址:legubiao/ocs2_ros2 这回是把原版OCS2中的所有功能都跑通啦~ 在Ubuntu22和24下都测试过,神经网络的训练是在24下跑的,显卡是笔记本3070 (可惜没怎么学过炼丹,没办法完全复现ETH的论文中的效果
打开封面
下载高清视频
观看高清视频
视频下载器
使用ROS2-Control + RL来控制四足机器人
【ROS2】可以轻松在WSL2上运行的ROS2版本OCS2机器人控制库
使用ROS2-Control + OCS2来控制四足机器人
使用ROS2 Control来控制四足机器人
使用WSL2和Webots启动ROS2仿真并在网页APP中操控机器人
使用urdf在ROS2中构建四足机器人的Gazebo和Mujoco仿真
[北理AI分享] 亿点点机器人 Stanford ALOHA的背后
学习小记:如何解决Rviz和Gazebo中机器人运动不同步的问题(Rviz中机器人固定不动的问题)
ROS2D-Quasar 使用Docker在Jetson小车上部署
ROS2D-Quasar 实机演示
耐冲击腿部结构
ROS2D-Quasar 基于Vue3开发的ROS1前端程序
具身智能新思路———Diffusion Policy 结合 PPO 模仿+强化 (上)
OCS2 安装例程demo测试 太难安装了 但是库确实牛!!!
《ROS 2机器人开发从入门到实践》6.5.2使用 Gazebo 接入 ros2_control
Go2开发教学10-SLAM 导航服务接口
斯坦福大学最新!Helpful DoggyBot:四足机器人在开放世界中取回任意物体
强化学习四足机器人二
Diffusion Policy 结合 PPO 模仿+强化 (下)
《ROS 2机器人开发从入门到实践》6.4.4 使用两轮差速插件控制机器人
ETH提出基于学习的四足机器人爬梯子控制方法 | 附论文
《ROS 2机器人开发从入门到实践》6.2.5完善机器人执行器部件
【开源】舵机机器人控制板-舵狗控制板-高度集成-ESP32S3主控-18路PWM信号输出
四足机器人足臂协同 ocs2 qm_control 开源项目学习
《ROS 2机器人开发从入门到实践》7 自主导航 让机器人自己动起来
《ROS 2机器人开发从入门到实践》6.4.1安装与使用Gazebo构建世界
Diffusion-based Path Planner for Synthesizing Trajectories Applied on Quadruped
《ROS 2机器人开发从入门到实践》6.2.6贴合地面,添加虚拟部件
《ROS 2机器人开发从入门到实践》6.4.7深度相机传感器仿真
《ROS 2机器人开发从入门到实践》6.4.3 使用Gazebo标签扩展URDF
《ROS 2机器人开发从入门到实践》7.1 机器人导航介绍
07,树莓派和ROS2学习笔记,编写第一个Publisher,树莓派ROS2接收esp32发布的数据
2024 IROS QRC(四足机器人挑战赛)浙大机器人队自主导航运动
《ROS 2机器人开发从入门到实践》6.1 机器人建模与仿真概述
依托自研关节电机组件的机器人,可实现载人行走。四足狗售价3.9万,关节电机售价2499。
《ROS 2机器人开发从入门到实践》5.6 ROS 2基础之Git进阶
《ROS 2机器人开发从入门到实践》6.4.5 激光雷达传感器仿真
《ROS 2机器人开发从入门到实践》6.4.6惯性测量传感器仿真
微雪 UGV Rover 和 UGV Beast安装Jetson Orin和电池教程
《ROS 2机器人开发从入门到实践》5.6.2 Git进阶之学会撤销代码