V
主页
京东 11.11 红包
pointlio_testing3
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
Gaussian-SLAM Photo-realistic Dense SLAM with Gaussian Splatting
DPVO testing 0482
Gaussian Splatting SLAM
(ccmslam)基于三个agents的单目SLAM地图融合
DPVO testing 0497
基于nsh_indoor_outdoor数据集的A-LOAM复现(3D LiDAR SLAM)
DPVO testing 0492
DPVO testing 0493
基于nsh_indoor_outdoor数据集的LeGO-LOAM复现(3D LiDAR SLAM)
evio_testing3
GS-LIVOM (Environment Guideline)
Gaussian Splatting SLAM Testing using euroc mh02
envio_testing3
single kobuki robot slam based on rrt_exploration package
RGBD GS-ICP SLAM testing in rgbd_dataset_freiburg2_xyz
esvo_core_mvstereo
基于intel realsense l515激光相机的rtabmap
two_turtlebot2_LiDAR-SLAM_cartographer
LiDAR-NeRF:Novel LiDAR View Synthesis via Neural Radiance Fields
ImMesh Testing using hku_campus_seq_00
Simulation for ORB-SLAM
SplaTAM Testing using TUM-Dataset freiburg1_desk_seed0(训练过程可视化)
self-developed LVI-Mapping testing hku_campus_seq_00
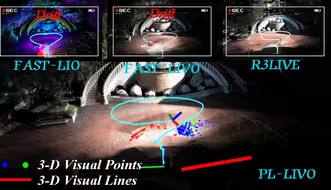
Point-line LIVO Using Patch-Based Gradient Optimization for Degenerate Scenes
cartographer_LIDAR_SLAM_basedon_QRcode_lamdmark
aloam_kitti_00
esvo_time_surface
ImMesh Testing using hku_campus_seq_02
RGBD GS-ICP SLAM testing in rgbd_dataset_freiburg1_desk
当黑神话遇上SLAM
Gaussian-SLAM testing tum
SLAM为什么需要IMU
轮足机器人|平衡步兵静态障碍物导航避障
cartographer_3D_LiDAR_SLAM——WithLandmarks
Multi-sensor fusion for VLP-SLAM localization and navigation
SplaTAM Testing using TUM-Dataset freiburg1_room_seed0(训练过程可视化)
(experiment) single turtlebot3 robot slam based on rrt_exploration package
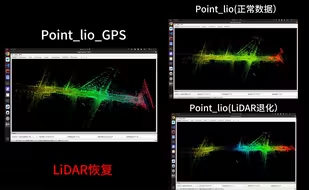
Point_lio_gps解决LiDAR退化导致的里程计漂移。
套件教程-Point LIO介绍与使用