V
主页
单键控制启停编程与仿真调试——置位优先指令
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
涂胶站编程调试P2人机交互与CASE指令应用
单键控制启停编程调试——脉冲指令与FB块
通过触摸屏控制机器人启停功能编程与调试
单按钮控制启停PLC与HMI编程仿真调
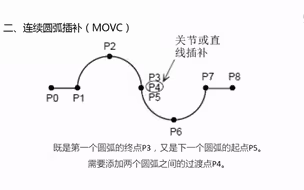
安川机器人圆弧指令编程
西门子1200plc:气缸动作PLC与HMI仿真调试part2
信捷PLC控制步进定位控制与编码器应用
5.3触摸屏案例1:小车直线运动_仿真调试
运动控制:信捷触摸屏控制伺服电机定位控制程序设计案例讲解
ABB机器人与西门子PLC通讯综合应用——双工位装配(test指令和组信号应用)
机器人及周边设备编程与调试part1
流程控制指令-if条件判断指令及应用
单部电梯仿真软件调试
8.1开关组态_普通开关控制电机仿真
11.1用户管理_1任务介绍
1.2西门子1200plc创建一个简单气缸控制程序并进行仿真调试
天宫二号机械臂及创造者专题
8.2开关组态_库开关控制电机仿真
西门子200smart编程-红绿灯控制案例_定时器和比较指令的应用
流程控制指令-TEST指令及应用
ABB Robotstudio和robotware的安装
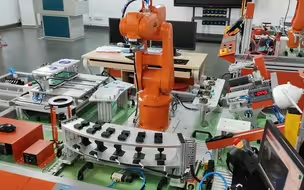
工业机器人操作与运维职业技能等级证书考核平台组成及功能简介
运动控制技术——参数设置操作
ABB机器人零点校正
西门子触摸屏操控ABB机器人暂停/继续——机器人中断指令应用
变频器外部端子控制接线与参数设置
安川机器人搬运案例编程
机器视觉_形状识别
12.2进阶版电机正反转控制PLC与HMI设计综合应用案例
快换和气爪气路的连接——工业机器人操作与运维
信捷运动控制综合实训平台组成介绍
10.2报警组态_模拟量报警
工业机器人操作与运维_吸盘的IO配置
ABB机器人与欧姆龙相机通讯编程调试
机器视觉案例_ABB机器人与欧姆龙视觉通讯part3
机器视觉案例_欧姆龙视觉软件part1
可编程按键配置
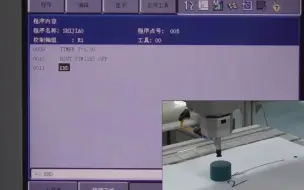
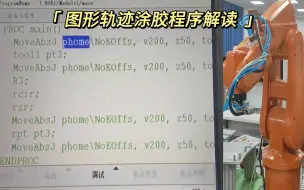
轨迹模拟涂胶程序解读 (双屏同步)
西门子1200编程案例:气缸动作PLC和HMI编程part1
涂胶工作站综合案例P1轨迹编程