V
主页
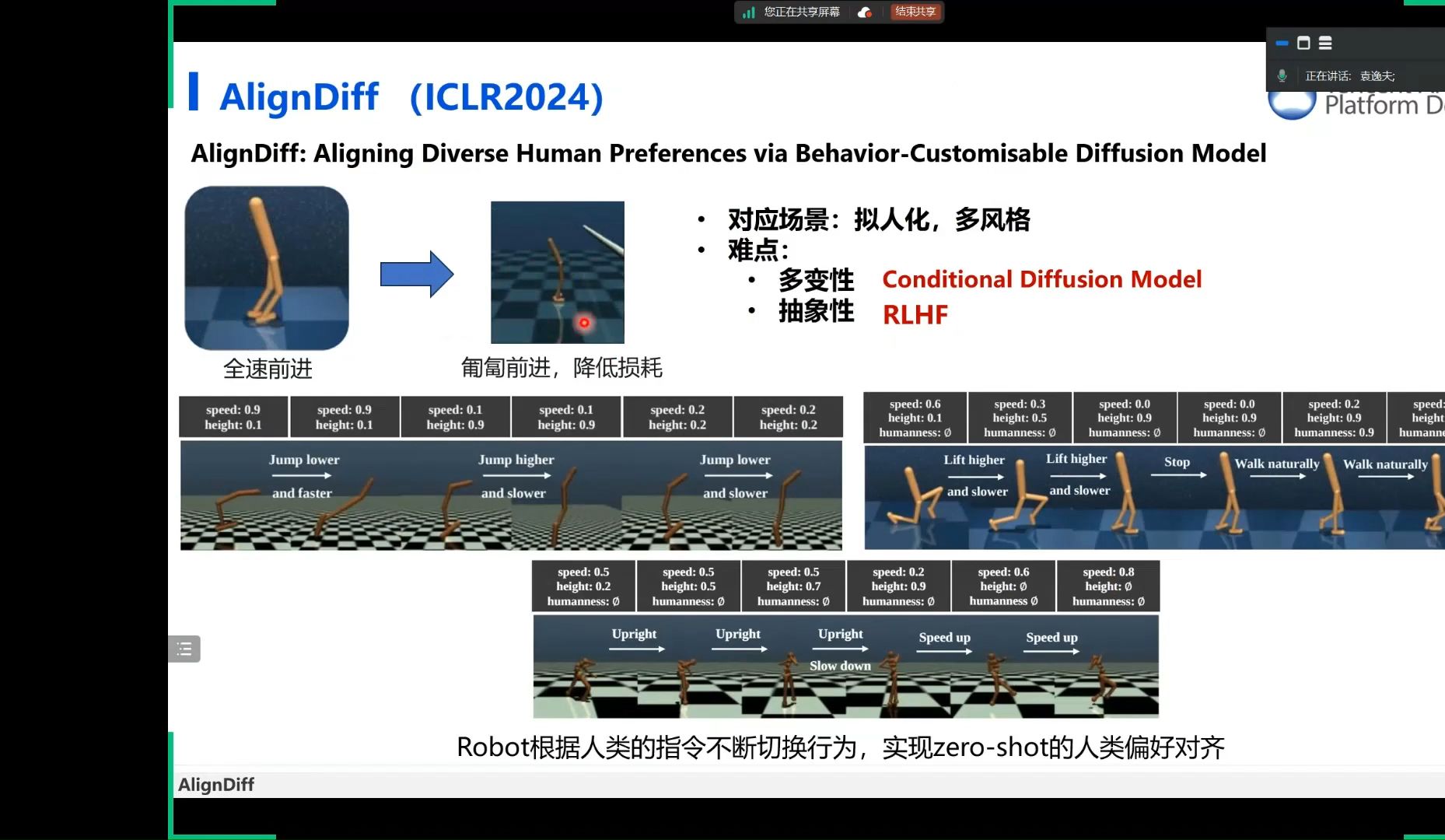
Diffusion Models for Decision Making, THU FuRoC 机器人小讲堂第三讲
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
Diffusion Model in Robotics
LLM for Robotics前沿- 系统性讲解大语言模型如何助力通用机器人(重制版)
【机器人学】密歇根大学安娜堡分校 ROB 501:机器人学中的数学(2018)by Jessy Grizzle
[RLC 2024] Sergey Levine,Reinforcement Learning in the Age of Foundation Models
【具身论文阅读】Diffuser: 基于diffusion的强化学习规划器
【LeRobot】中文字幕|Diffusion Policy: LeRobot Research Presentation 2 by Cheng Chi
【论文精讲】精讲Diffusion Policy扩散策略:基于扩散模型的机器人动作生成策略
入门机器人Diffusion Policy
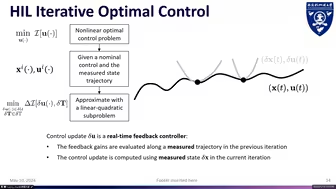
面向机器人系统的迭代最优控制算法研究和开发
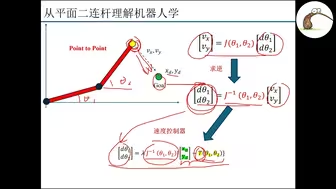
机器人运动学-逆运动学
【LeRobot】中文字幕|ALOHA and ACT: LeRobot Research Presentation 1 by Alexander Soare
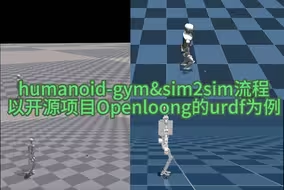
双足机器人强化学习humanoid-gym sim2sim详细学习过程,Openloong的urdf为例
双足行走的强化学习算法介绍与部署
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
机器人运动学-轨迹规划
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
你的具身智能第一课--基础技术路线
Learning Agile Legged Robot Control, THU FuRoC 机器人小讲堂第二讲
Talk | 卡耐基梅隆大学何泰然:安全、敏捷、能泛化的基于强化学习的机器人控制
【MOS的朋友们】Starkit队新年欢迎视频
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
LLM for Robotics前沿- 系统性讲解 大模型智能体 LLM Agents
2022定位导航冬令营-理论4:SLAM建图&路径规划
Diffusion Policy 结合 PPO 模仿+强化 (中)
SGS-Planner: A skeleton-guided spatiotemporal motion planner for flight in const
UNSW-ISTM PhD Video Interview | Yun ZHANG
【研1基本功 别人不教的,那就我来】SSH+Git+Gitee+Vscode 学会了就是代码管理大师
上海交大张伟楠强化学习课程第16讲:基于扩散模型的强化学习
强化学习踢球
AMP为啥一定得包含这个A呢,我换个Pairwise loss可不可以呢?看视频~(调试中,目前其实不算很理想)
【具身抓取课程-1】机器人基础
RoboCup2023 中国赛 vlog
【深度强化学习 CS285 2023】伯克利—中英字幕
[Furoc2023深度学习冬令营]Day2-Pytorch入门
只卖三千的人形机器人,竟能部署AI大模型?!
具身智能新思路———Diffusion Policy 结合 PPO 模仿+强化 (上)
【机器人科学III】探访美国名校Robotics教授,机器人进入千家万户究竟 缺点什么?
【研1.5基本功 (真的很简单)DeepSpeed & Accelerate】学点大模型基建准没错
模型预测控制 机器人小讲堂第六讲
寒假视觉培训第一讲——数字图像基础