V
主页
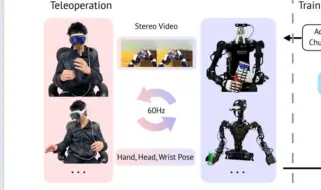
具身智能新思路———Diffusion Policy 结合 PPO 模仿+强化 (上)
发布人
具身智能新思路———Diffusion Policy 结合 PPO 模仿+强化
打开封面
下载高清视频
观看高清视频
视频下载器
Diffusion Policy 结合 PPO 模仿+强化 (中)
Hierarchical Diffusion Policy 实机实验
很多研究人员都放弃具身智能了
手写DiffusionPolicy【1】:最简单的机器人操作
ALOHA模仿学习ACT真机实践——笨蛋机械臂两天才学会瓶子
【LeRobot】中文字幕|Diffusion Policy: LeRobot Research Presentation 2 by Cheng Chi
全网首个灵巧手课程-灵巧手综述
你的具身智能第一课--基础技术路线
【论文分享】GR-2和何恺明具身智能首作
强化学习框架-Legged Gym 训练代码详解
零基础学习强化学习算法:ppo
李飞飞团队最新成果,基于大模型的机械臂抓取
何恺明首个具身智能工作!HPT:异构预训练Transformer!收录顶会NeurIPS 2024!
Diffusion Policy 结合 PPO 模仿+强化 (下)
【具身论文阅读】Diffuser: 基于diffusion的强化学习规划器
遥操作库Humanoid Arm Retarget详解(作者王文灏主讲)
Diffusion Models for Decision Making, THU FuRoC 机器人小讲堂第三讲
特斯拉机器人新作-工厂内视觉导航
上海交大张伟楠强化学习课程第16讲:基于扩散模型的强化学习
【具身论文阅读】视触联觉灵巧手操作
30元教你学会用Issacgym训练宇树机器狗试听第二期
具身智能-通用抓取综述(learningl base 端到端派)
CV强化论文分享-20241012
高擎机电运动控制算法开源|强化学习篇
【论文精讲】精讲Diffusion Policy扩散策略:基于扩散模型的机器人动作生成策略
Diffusion Model in Robotics
遥操作综述与方法总结
MPC+强化学习!Actor Critic模型预测控制,苏黎世大牛教授人类水平性能的自主视觉无人机演讲
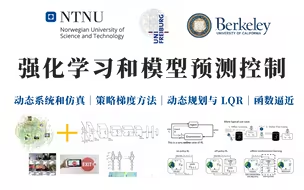
这可能是我见过强化学习和模型预测控制最好的教程!四大名校教授精讲动态系统和仿真、最优控制、策略梯度方法、MPC
具身智能课程-pybullt仿真器学习第一课
[论文速览]Diffusion Policy: Visuomotor Policy Learning via Action Diff.[2303.04137]
3分钟复现谷歌具身智能框架 - Code as Policies
[TIE 2024] Beyond End-Effector: 基于高灵敏度触觉传感器的物理人机交互
具身智能基础技术路线
最佳论文!Robotwin:首个双臂协同机器人策略学习Benchmark
具身智能公司及产品的讨论
代码实现大模型强化学习(PPO),看这个视频就够了。
具身智能常用AI工具-必看
通用抓取 ----2D图像分割
双热点强强联合的发文方向:Transformer+强化学习!