V
主页
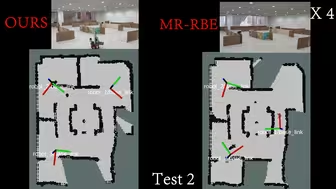
SGS-Planner: A skeleton-guided spatiotemporal motion planner for flight in const
发布人
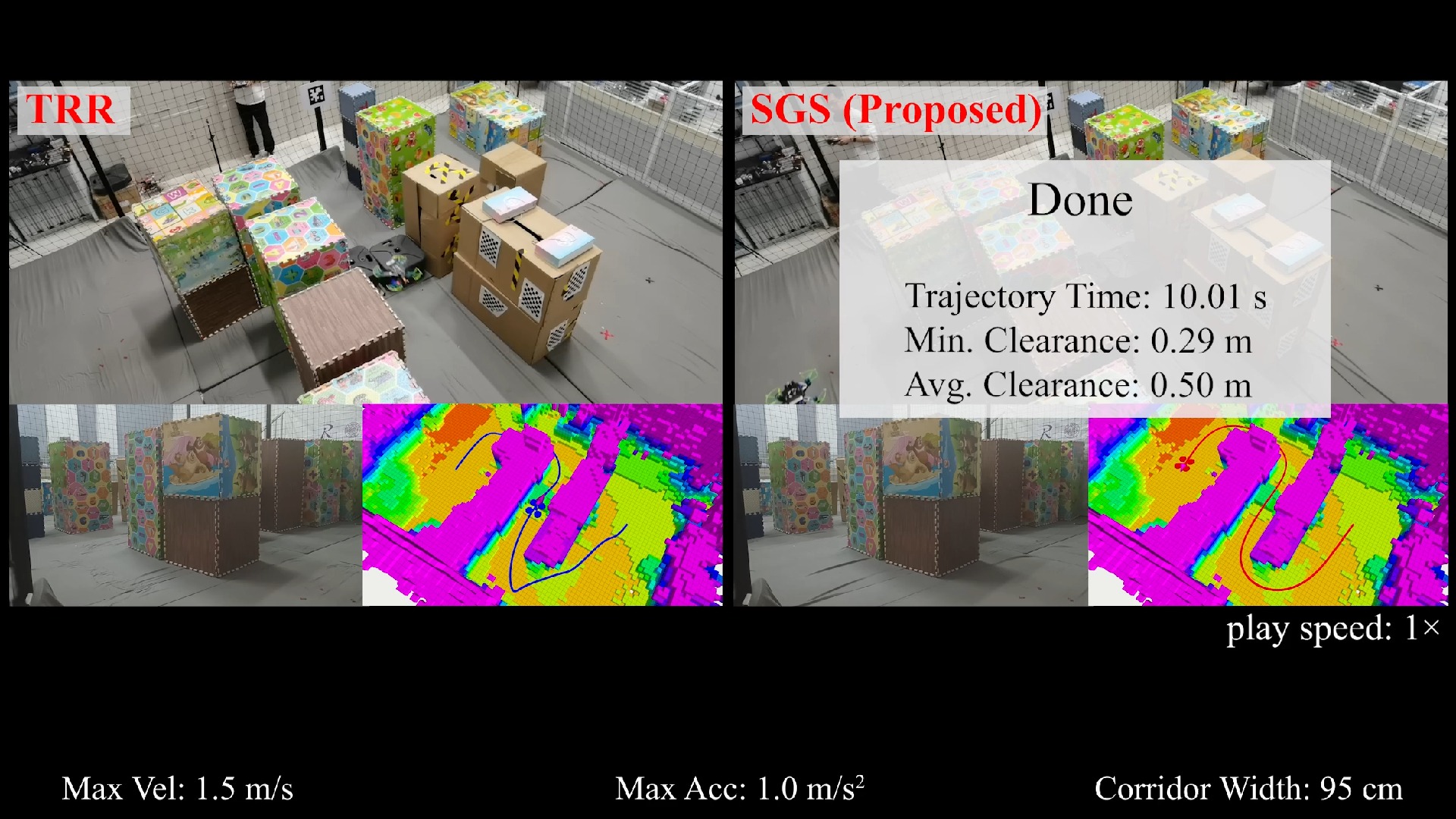
T. Li, S. Zhang, X. Zhang , Q. Dong, J. Huang. SGS-Planner: A skeleton-guided spatiotemporal motion planner for flight in constrained space, IEEE/ASME Transactions on Mechatronics , accepted, DOI: 10. 1109/TMECH. 2024. 3393144. ( https://ieeexplore.ieee.org/abstract/document/10530497/ ) Abstract: This article proposes a skeleton-guided spatiotemporal motion planner (SGS-Planner) for safe and efficient aerial robot navigation in challenging constrained space. The planner takes advantage of a spatial-temporal hierarchical framework to generate a safer and more efficient trajectory rapidly. In spatial planning, different from existing approaches that either ignore the clearance between trajectories and obstacles or suffer from local minima, path smoothing is guided by a skeleton away from obstacles. Specifically, a fast sphere inflation-based skeleton extraction method is elaborately designed for high-clearance path searching. After that, we propose a skeleton-guided path smoothing approach to generate smooth and high-clearance paths, where the smoothing is formulated as unconstrained quadratic programs. In temporal planning, the feasible trajectory is generated along the optimized path by employing an optimal time allocation method and a parallel back-up strategy to guarantee the success of planning. We validate the performance of the proposed method in extensive challenging simulations and real-world environments. Comparative results show that our approach outperforms state-of-the-art methods in terms of planning success rate, average computational efficiency (5–24 times faster), and minimum clearance (12%–177% larger) in restricted space.
打开封面
下载高清视频
观看高清视频
视频下载器
G2VD Planner: efficient motion planning with grid-based generalized Voronoi dia
Fast and Communication-Efficient Multi-UAV Exploration Via Voronoi Partition on
LLM-PySC2:LLM starcraft II learning environment 基于pysc2的大语言模型星际争霸2决策仿真训练环境
SFRE: Safe and Fast Robotic Exploration for 3D Uneven terrains
Incremental 2-D line segment-based mapping
MPOC-SLAM: an RGB-D SLAM system with motion probability and object category in
BA-LIOM: Tightly-coupled Laser-Inertial odometry and mapping with bundle adjustm
FI-SLAM: Feature Information-Based Robust and Efficient Vision-Inertial-Aided Li
我也会射桨了
MRPB 1.0: A unified benchmark for the evaluation of mobile robot local planning
TMPU: A Framework for Terrain Traversability Mapping and Planning in Uneven and
如何获得穿越机的顶级手感? RDC90遥杆测评
飞无人机还要执照?那该怎么考?
Newly added: An Enhanced Framework for Fast Trajectory Recovery under IVDs
不到百元做带图传的无人机
IR-VIO Illumination-Robust Visual-Inertial Odometry Based on Adaptive Weighting
TC2LI-SLAM: A Tightly-Coupled Camera-LiDAR-Inertial SLAM System
High-Accuracy Pose Estimation for 3D Reconstruction Considering the Manipulator
Target-Free and User-Friendly online extrinsic calibration of LiDAR-IMU-Camera s
CURE- A Hierarchical Framework for Multi-Robot Autonomous Exploration(Video_1)
漠叔谈战场无人机演变,从1.0到3.0全程干货,
大一职业规划大赛夺冠⁉️我有话说……
CURE- A Hierarchical Framework for Multi-Robot Autonomous Exploration(Video_2)
还没调好pid,在湖上浪了一下就丢了,损失了300多
制作开源无人机 - Make an Open Source Drone
不含坐标的jpg图片,pdf规划图纸,如何配准叠加卫星影像地图?
30天终极规划
一场航展,改变未来的战争形态
🔥给没有无人机的朋友,来点航拍的震撼
有人问怎么发现FPV,来往这里看
ArcGIS Pro制作建筑与规划场地前期方案图
穿越机微操教程:灵活转弯
马斯克推荐一读:为何他能保持极度高效?
无人机表演展示大国重器,强国科技,真的太厉害了!
无人机克星高功率微波武器,龙哥既卖矛又卖盾
珠海航展 无人机蜂群 精彩一幕
不要迷信PIX飞控,滑跑着陆直接侧翻炸机,拉都拉不起来,唉!
兔子:听说你想拦截!
“九天”刚亮相就被网友要求改名?究竟发生了啥?
真人cs wargame 没想到科幻大片成真 无人机蜂群