V
主页
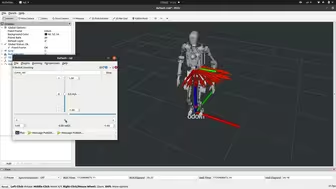
OpenLoong开源人形机器人青龙Gazebo仿真
发布人
代码库地址:https://atomgit.com/openloong/OpenLoongROS
打开封面
下载高清视频
观看高清视频
视频下载器
OpenLoong青龙ROS运动控制
国产开源人形机器人OpenLoong代码首测
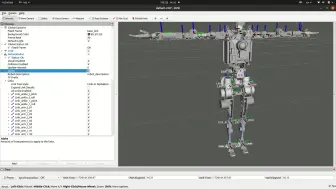
OpenLoong青龙人形机器人ROS URDF包
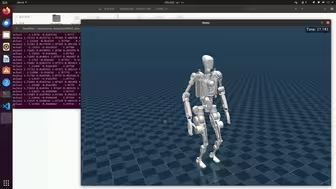
OpenLoong强化学习测试行走
也是玩上ROS了
一阶倒立摆LQR, MPC控制,Python, C++源码公开, Gazebo仿真
OpenLoong状态估计之基于接触和运动学的LegOdom
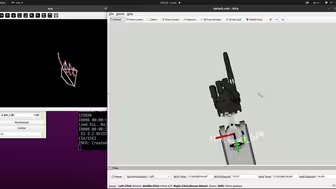
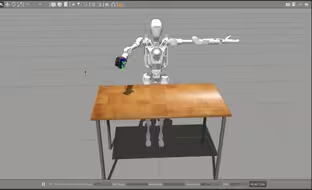
OpenLoong给青龙加个能动的机械手
仅需一步,瞬间提升树莓派5的AI算力,化身性能猛兽!
视觉组 | YOLO自瞄终于能打中了
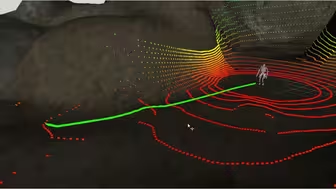
OpenLoong人形机器人全地形自主导航测试(最后摔了:)
OpenLoong抓取测试
视觉组 | 搓出了第1版使用 ROS2 + YOLO v8 的自瞄
Matlab玩家狂喜!!!纵享丝滑~
OpenLoong机械臂遥操作测试
这下谁还找男朋友啊,你的定制Ai男友已上线!
分享几个ROS简单的脚本
自制ros建图导航机器人2
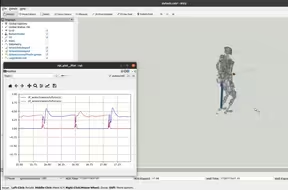
青龙openloong加上状态估计
【开源无人机】零基础首飞一架开源无人机
【开源无人机】从零调试一架开源无人机
ROS控制 | 第一轮导航代码讲解
钧舵EPG50-60柔性夹爪 ROS SDK–法奥FR3长臂猿模式
画了一个机器人ROS开发板
ROS控制 | 第一轮控制功能包讲解
轮足静态障碍物导航避障
机器人竞赛基础技术讲解(2)-9月18日
机器人竞赛基础技术讲解(1)-9月13日
体验Isaac sim4.2中的人形机器人示例
就说这线找的稳不稳吧(第二季)
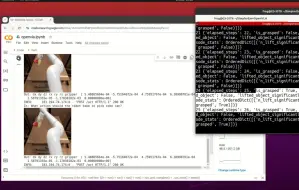
OpenVLA机器人大模型云端部署测试
[开源] 基于Qt的ROS1/ROS2人机交互软件-V0.3.7版本,优化建图时的地图显示效果
《松灵ROS 2开讲啦》第8期 机械臂的使用
使用ROS2 Control来控制四足机器人
为啥人形机器人不能站直了走路?从科学角度来讲讲!
记录从零驯服双足机器人day3
【开源无人船】超维USV-M690开源ROS无人船
十年了!winbox终于支持原生MacOS啦!一起来看4.0有哪些变化
不知这个定位精度能否对标MID360
【软路由折腾系列】第十一期:RouterOS利用Docker容器安装MosDNS实现DNS分流 |MOSDNS|DNS分流|DNS防泄漏|Container容器