V
主页
京东 11.11 红包
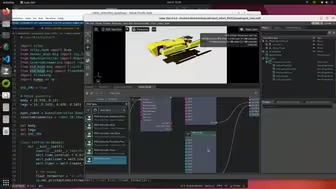
一阶倒立摆LQR, MPC控制,Python, C++源码公开, Gazebo仿真
发布人
代码: https://github.com/Radiance-nt/Cart_Pole_Inverted_Pendulum_Control
打开封面
下载高清视频
观看高清视频
视频下载器
基于MATLAB的一阶倒立摆系统仿真(模型+word报告)
FOC动量飞轮倒立摆
基于MWORKS Syslab和 Sysplorer的一、二阶倒立摆仿真
【超多模型MPC算法】开源Mujoco-MPC演示
【Python】人形机器人——模型预测控制
1.5.1拉普拉斯变换
【自控技巧】禁用计算器,应该如何设计串联超前校正装置?
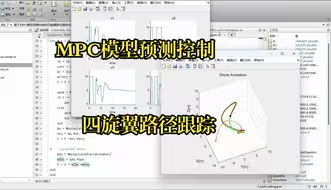
基于MPC模型预测控制的四旋翼路径跟踪仿真设计(状态空间模型)
TITA强化学习迁移
ROS 路径规划控制
嘎子当警察不卖酒了
1.5.2拉普拉斯反变换
1.4自控中的复数基础
使用Isaac Sim和ROS2控制机器狗指南
有刷电机Simulink直连控制-二阶多智能体位置跟踪
学长说:有佬的帮助就是不一样!!!
【2025控制考研】每日一题-195—复杂的结构图绘制信号流图、梅逊增益公式求传递函数
四足机器人足臂协同 ocs2 qm_control 开源项目学习
现控题库,合工大2023年第8题讲解:多角度复盘真题,现代控制理论【小鱼老师控制课堂】
机器人移动底盘
省赛综测学分、奖学金、学ROS,统统拿下
1.5.3拉普拉斯变换求解微分方程
控制之美(卷1)第二版 上线 ~~ 欢迎选购
【开源教程】ROS驱动程序控制舵机(源码资源链接在简介)
ROS与STM32通信编程(上)
开源!基于RRT*的路径规划算法(ROS C++/Python/Matlab实现)
【开源无人机】从零组装一架开源无人机M0-F250
【顶刊复现】基于MPC模型预测控制水下机器人AUV的路径跟踪
【开源无人机】室内款低成本无人机M0-F250介绍及代码讲解(源码资源链接在简介)
这将是一套绝杀的控制考研模拟卷——AT自动化考研控制理论决胜十套卷
基于优化的敏捷足式机器人控制与规划
深度视觉,三维感知!全新3D深度视觉机械臂闪亮登场,空间抓取、体积测算统统不在话下!
7.2无人机PID参数调试
【2025控制考研】每日一题-187—劳斯判据和终值定理
【开源无人船】从零组装一艘测绘无人船
【开源无人机】ROS无人机编队代码讲解
12步搭建智能机器人: 从设计到AI入门
【开源无人机】从零调试一架开源无人机M0-F250
自动驾驶入门技术全栈实战解析-1-感知篇
【2025控制考研】每日一题-191—由相角裕度求参数