V
主页
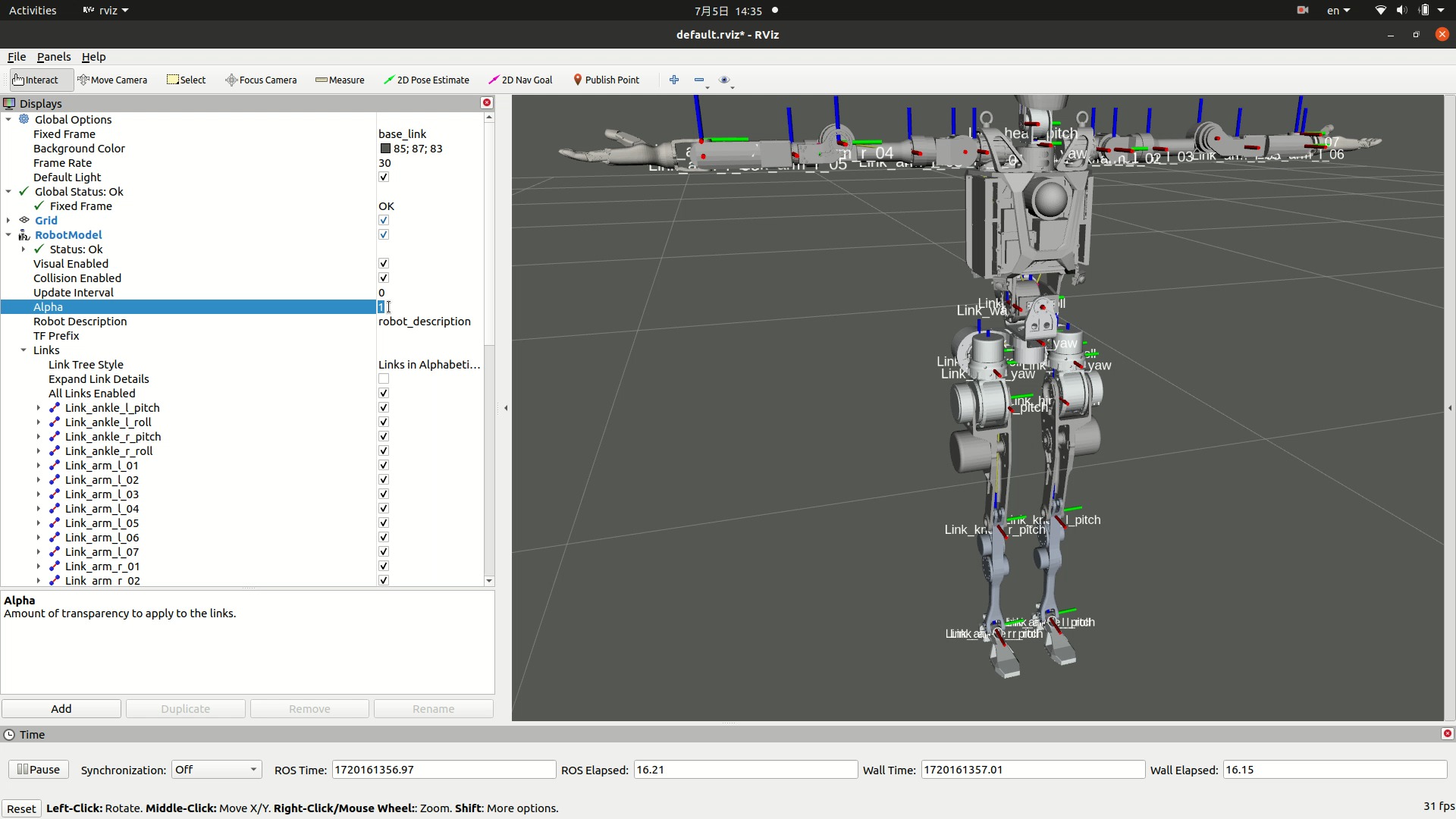
OpenLoong青龙人形机器人ROS URDF包
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
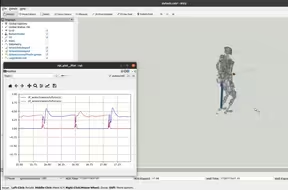
OpenLoong青龙ROS运动控制
OpenLoong开源人形机器人青龙Gazebo仿真
国产开源人形机器人OpenLoong代码首测
直击WAIC2024,中国首款全尺寸开源人形机器人“青龙”震撼发布!#2024世界人工智能大会 #机器人 #人形机器人 #青龙机器人
ROS 中的相机话题
OpenLoong给青龙加个能动的机械手
OpenLoong状态估计之基于接触和运动学的LegOdom
Carla+ROS2联合仿真测试,像玩极品飞车一样
终于画出来咯
抽象的ROS课设
工创机器人新品出炉
ROS 航点导航功能的 Python 实现
猜猜 raicom 地图的满分下限是多少
ROS仿真 移动机器人导航 路径规划 运动控制
ROS 颜色目标识别与定位的 C++ 实现
自制局部规划器 | 地图 raicom
ROS 智能小车 未知地图自主导航建图 机器人导论大作业留档
自制局部规划器 | 地图 racetrack_1
01-机械臂算法和ROS设置
立创泰山派RK3566 ROS小车演示视频
ROS 相机图像获取的 C++ 实现
(开源)最迷你的ROS2 机器人,自动路径规划、视觉识别、人体检测跟随、手势识别控制、多形态切换(想要资料评论区留言安排!)
RoboCup 机器人(智能搬运赛)
基于ROS通信的分布式多进程路径跟踪控制仿真系统
RoboCup机器人日常调试
[强化学习]自动驾驶路径规划与控制-DQN/DDPG+pure pursuit路径跟踪实现
【2024电赛无人机】机架介绍
C++单元测试gtest的介绍及其在ROS中的应用实战(一)
共轴双桨四旋翼设计
智能车ros组室外专项赛again
里程计:我的tf准。gmapping:你闭嘴,我自己会画
HANDLER——基于YOLOv8及SLAM算法的智能家庭服务机器人
专家:这无人机得逼着策划人加班想新赛题了
【ROS】【三维重建】【工程实践】 雷达+深度相机实现深度优先搜索
能导航了,但只能导一点点,不能导多了
Ros1通过moveit、话题通讯和tf变换等操作实现安装d435i相机和夹爪的ur机械臂对空间中球体的定位与抓取
自动驾驶|贴边行驶|贴边绕障|精度测试|巡检清扫一体
哪吒 MiniROS 机器人结构安装视频(ROS)
ROS-Gazebo-Rviz-轨迹规划与跟踪算法合集__01_LQR&A_Star
RTK履带无人车户外曲线路径跟踪(精度3cm内)