V
主页
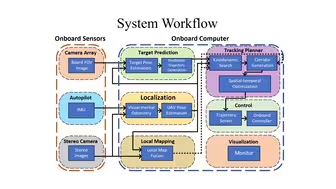
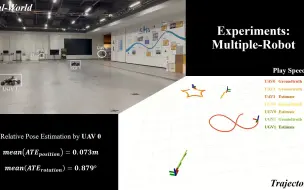
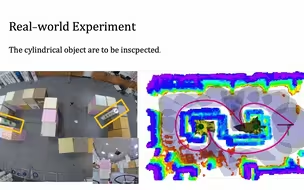
Simultaneous Time Synchronization and Mutual Localization for Multi-robot System
发布人
Video for the ICRA 2024 submission. Title: Simultaneous Time Synchronization and Mutual Localization for Multi-robot System BGM: Here We Are Again preprint: to be released
打开封面
下载高清视频
观看高清视频
视频下载器
浙江大学 FAST-Lab FAR 课题组2023代表性研究成果|无人机|人工智能|集群机器人|自主导航
Tell Robots Where to Go: Identifying Localization-Friendly Areas via Perturbatio
浙江大学 FAST-Lab 2021代表性研究成果 | 空中机器人 | 人工智能 | 集群机器人 | 自主导航
Single-Shot Initial Mutual Localization for Micro Aerial Swarms
走路最像人的国产机器人,真的是一股子人味。
Preserving Relative Localization of FoV-Limited Drone Swarm ...
Fast-Tracker: A Robust Aerial System for Tracking Agile Target
复杂环境下的编队飞行 (Formation Flight in Dense Environments)
无人机跟踪与飞落 (Adaptive Tracking and Perching for Quadrotor in Dynamic Scenarios)
Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Compl
Robo-centric ESDF: A Fast and Accurate Whole-body Collision Evaluation Tool...
A Trajectory-based Flight Assistive System for Novice Pilots in Drone Racing...
Sparse-Graph-Enabled Formation Planning for Large-Scale Aerial Swarms
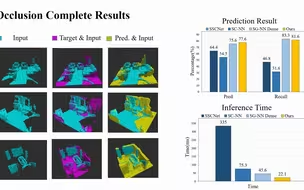
Learning-based 3D Occupancy Prediction for Navigation in Occluded Environments
CREPES: Cooperative RElative Pose EStimation towards Real-World Multi-Robot Syst
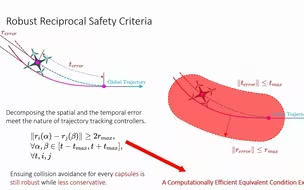
Robust Trajectory Planning for Spatial-Temporal Multi-Drone Coordination
浙大研发空地无人机,竟能飞檐走壁
高飞老师 “科学脱口秀”-----浙江大学2022年度十大学术进展
EGO-Planner: An ESDF-free Gradient-based Local Planner for Quadrotors
Gaussian-Splatting-based Active Reconstruction
机械手爬行
今年航展最惨的东西
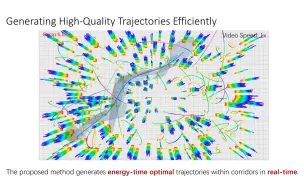
Generating Large-Scale Trajectories Efficiently using Double Description
浙江大学 FAST-Lab 2022代表性研究成果 | 无人机 | 人工智能 | 集群机器人 | 自主导航
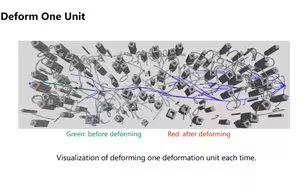
STD-Trees: Spatio-temporal Deformable Trees for Multirotors Kinodynamic Planning
IROS 2017: Gradient-Based Online Safe Trajectory Generation for Quadrotor Flight
Mapless-Planner: A Robust and Fast Planning Framework without Map Fusion
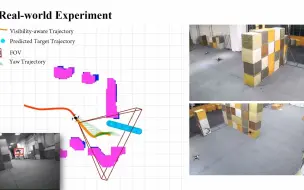
Visibility-aware Trajectory Optimization with Application to Aerial Tracking
Star-Convex Constrained Optimization for Visibility Planning
Collaborative Planning for Catching and Transporting Objects in Unstructured ...
Model-Based Planning and Control for Terrestrial-Aerial Bimodal Vehicles ...
A Linear and Exact Algorithm for Whole-Body Collision Evaluation via Scale Op...
Auto-filmer: Autonomous Aerial Videography under Human Interaction
Elastic Tracker: A Spatio-temporal Planner for Flexible Aerial Tracking
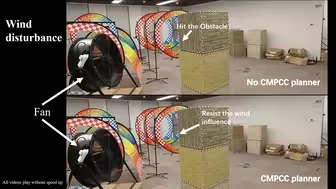
CMPCC: Corridor-based Model Predictive Contouring Control for Aggressive Flight
Whole-Body Real-Time Motion Planning for Multicopters
VID-Fusion: Robust Visual-Inertial-Dynamics Odometry
20届智能车双车赛题浅浅完个赛吧!
Efficient Kino-Planning with Regional Optimization and Bidirectional Search
Polynomial-based Online Planning for Drone Racing in Dynamic Environments