V
主页
Preserving Relative Localization of FoV-Limited Drone Swarm ...
发布人
Video for the IROS submission. Title: Preserving Relative Localization of FoV-Limited Drone Swarm via Active Mutual Observation BGM: 平和的日常 Preprint: to be released ~
打开封面
下载高清视频
观看高清视频
视频下载器
Fast-Tracker 2.0
Sparse-Graph-Enabled Formation Planning for Large-Scale Aerial Swarms
浙江大学 FAST-Lab 2021代表性研究成果 | 空中机器人 | 人工智能 | 集群机器人 | 自主导航
【完结】从0制作自主空中机器人 | 开源 | 浙江大学Fast-Lab
Learning Agility Adaptation for Flight in Clutter
基于扩散模型的毫米波雷达稠密精确感知
浙江大学 FAST-Lab FAR 课题组2023代表性研究成果|无人机|人工智能|集群机器人|自主导航
Single-Shot Initial Mutual Localization for Micro Aerial Swarms
人 工 智 能
Autonomous Drone Race, 自动无人机竞速
Meeting-Merging-Mission: A Multi-robot Coordinate Framework for Exploration
Geometrically Constrained Trajectory Optimization for Multicopters
无人机跟踪与飞落 (Adaptive Tracking and Perching for Quadrotor in Dynamic Scenarios)
EGO-Swarm: A Fully Autonomous and Decentralized Quadrotor Swarm System
Robo-centric ESDF: A Fast and Accurate Whole-body Collision Evaluation Tool...
A Linear and Exact Algorithm for Whole-Body Collision Evaluation via Scale Op...
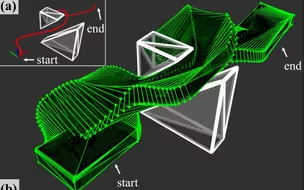
隐式扫掠体积SDF:任意形状机器人连续碰撞避免轨迹生成
Prim-Planner: An Ultra Lightweight Quadrotor Planner with Time-optimal Primitive
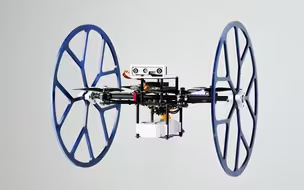
Model-Based Planning and Control for Terrestrial-Aerial Bimodal Vehicles ...
复杂环境下的编队飞行 (Formation Flight in Dense Environments)
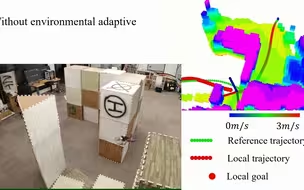
EVA-Planner: Environmental Adaptive Quadrotor Planning
Distributed Swarm Trajectory Optimization for Formation Flight in Dense
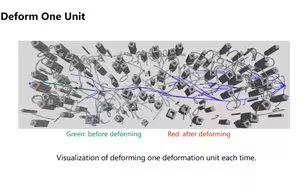
STD-Trees: Spatio-temporal Deformable Trees for Multirotors Kinodynamic Planning
Polynomial-based Online Planning for Drone Racing in Dynamic Environments
Continuous Implicit SDF Based Any-shape Robot Trajectory Optimization
An Efficient Trajectory Planner for Car-like Robots on Uneven Terrain
Decentralized Spatial-Temporal Trajectory Planning for Multicopter Swarms
Differential Flatness-Based Trajectory Planning for Autonomous Vehicles
Gaussian-Splatting-based Active Reconstruction
强到离谱!一年轻松发6篇综述SCI!B站最全SCI论文写作指导教程,研究生SCI论文从写作到发表全过程精讲,太适合小白了!人工智能|SCI|论文写作
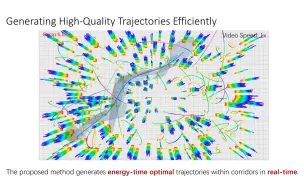
Generating Large-Scale Trajectories Efficiently using Double Description
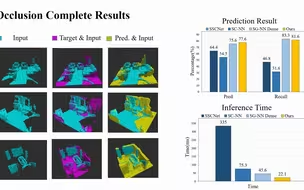
Learning-based 3D Occupancy Prediction for Navigation in Occluded Environments
ROBOMASTER2023-2024 机甲大师高校人工智能挑战赛·精英赛 | 冠军 | Turtle战队 | 完赛视频 | 系统方案 | 算法原理
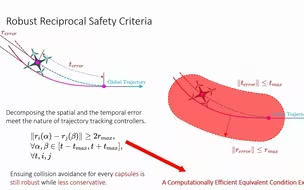
Robust Trajectory Planning for Spatial-Temporal Multi-Drone Coordination
Star-Convex Constrained Optimization for Visibility Planning
Enhanced Decentralized Autonomous Aerial Swarm with Group Planning
移动机器人运动规划与集群协同直播回放
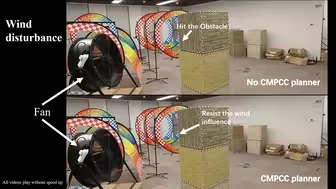
CMPCC: Corridor-based Model Predictive Contouring Control for Aggressive Flight
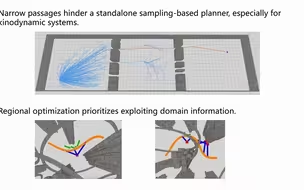
Integrating Fast Regional Optimization into Sampling-based Kinodynamic Planning
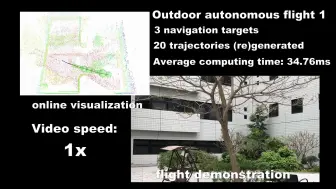
Flying on Pointclouds