V
主页
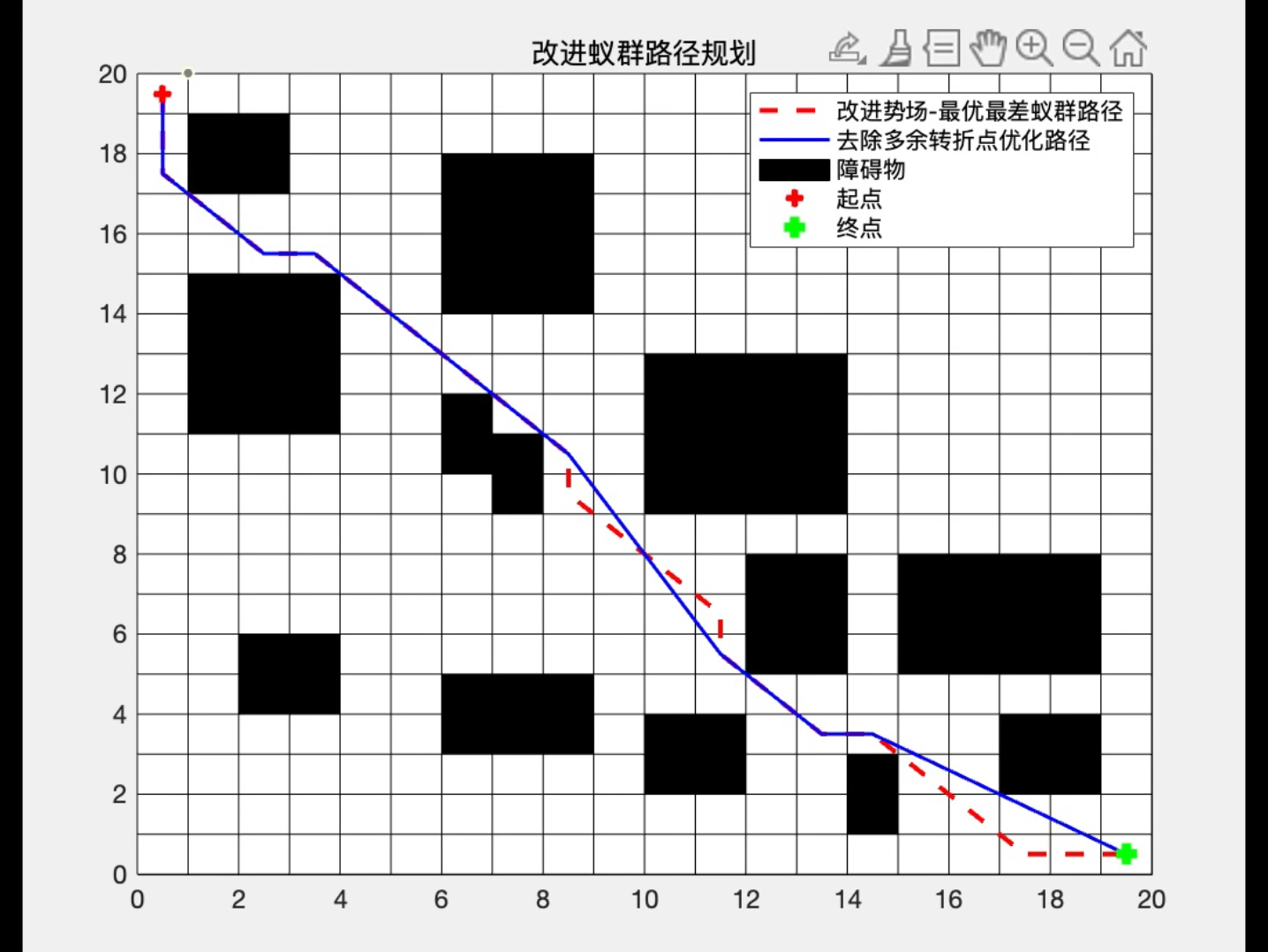
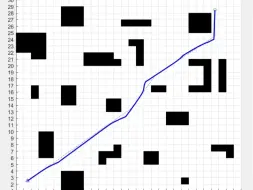
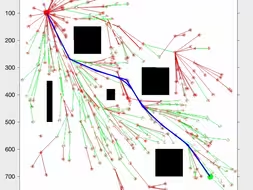
改进势场蚁群+三角修剪法 蚁群算法 ACO 路径规划 aco 路径规划 势场蚁群 优化路径
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
改进蚁群算法 路径规划 ACO 与 ACO EACO 精英蚁群 和AS 序列蚁群 对比 aco改进算法
蚁群算法 改进蚁群算法 ACO 二次优化路径 aco路径规划 改进对比 对路径进行两次优化 使路径更短
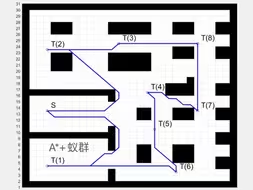
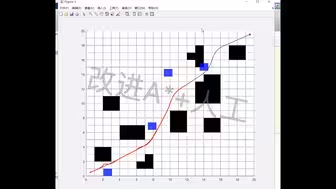
多目标路径规划 A*+模拟退火 A*+蚁群 用A*算法规划两点间的距离,然后依据规划路径距离模拟退火算法或者蚁群算法运算全过程最短距离 ACO Astar SA
改进蚁群算法 ACO路径规划 改进信息素更新 改进启发因子 aco 蚁群路径规划 改进后收敛快 Matlab
路径规划算法 改进A*和改进动态窗口融合算法 Astar 动态窗口法 Matlab
改进蚁群算法ACO做为全局路径规划,融合局部算法动态窗口DWA算法 动态路径规划 aco dwa 融合
基于改进A*算法融合改进人工势场算法的路径规划 改进四领域(上下左右) A*算法的AGV路径规划 设置取货点,进出口路径规划,改进对比,优化少转折
路径规划算法 A*和人工势场融合 动态路径规划
改进A*算法 A星 Astar astar 算法 路径规划
RRT 双向RRT 融合APF 人工势场法 结合Dijkstra优化路径 rrt 改进 路径规划 apf 融合算法 对比路径规划
蚁群算法 ACO 编队航路规划,海图栅格化,考虑编队队形,根据编队尺寸大小对障碍物进行膨胀处理,保持编队整体避障。一字型,三角形编队 aco 路径规划 编队
融合粒子群PSO 模拟退火SA 动态窗口法 DWA 动态障碍物 动态路径规划 融合算法 pso-sa-dwa 粒子群算法 模拟退火 dwa
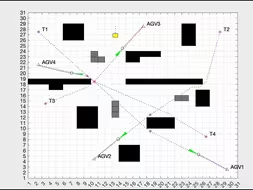
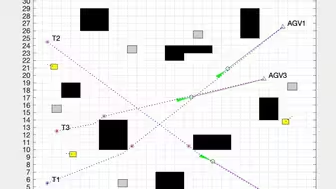
改进蚁群算法 ACO和动态窗口法DWA融合算法 动态障碍物 4个AGV 临时障碍物 优先级避障 动态路径规划 dwa aco 路径规划 改进融合算法
传统A星与改进A星的编队路径规划,采用5*5邻域搜索、动态加权 考虑编队队形,根据编队尺寸大小对障碍物进行膨胀处理,一字型,三角形编队 Astar A*
RRT星 人工势场法 APF 融合算法 动态障碍物 动态避障规划 apf路径规划 rrtstar rrt 图像处理 RRT* rrt* 路径规划
基于安全考虑的蚁群改进算法 蚁群算法 ACO 路径规划 提高了安全性 aco 蚁群算法 路径规划
多机器人路径规划 具有优先级 A*算法 蚁群算法 Astar aco astar 动态障碍物 动态路径规划
人工势场法 APF 改进路径规划 加入虚拟目标点 解决了陷入极小值问题 改进apf 路径规划 动态规划
多目标点路径规划 可以设置多个经过点 利用A* 改进A* 蚁群 ACO RRT 遗传算法GA rrt等多目标 巡检 A星算法 Astar aco 必经点
改进的A* Astar A星+改进的人工势场apf混合算法。动态路径规划
改进灰狼优化算法(IGWO)和原始GWO优化机器人路径规划
灰狼算法路径规划 改进算法 去除多余路径点 GWO路径规划 gwo 灰狼改进算法
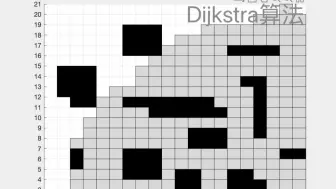
A* astar Astar 路径规划 Dijkstra算法 改进跳点Astar 算法 路径规划
改进A*与改进人工势场APF的路径规划算法。A星算法 Astar 融合apf astar 改进路径规划 邻域搜索改进 动态加权 冗余点删除 改进APF斥力函数
改进人工势场法 APF apf 路径规划 静态障碍物 动态障碍物 动态目标点 改进路径规划算法 apf APF 动态规划
informed-rrtstar 路径规划 三次B样条曲线化 贝塞尔曲线 rrt改进 与RRT RRT* 做对比 改进RRT动态路径规划 rrt* RRT星
各类算法对比 路径规划 蚁群 ACO astar 改进
多机器人全覆盖 CCPP 多机器人 全覆盖路径规划 A星避开死区 Astar算法 A*算法 ccpp 路径规划
人工势场法 APF 改进算法 目标不可达 陷入极小值 无人机路径规划 山峰 apf 动态路径规划
蚁群算法 aco 动态规划 路径规划 ACO 动态障碍物 动态规划 蚁群
基于领航跟随法与人工势场(APF)法的编队动态避障 三维路径规划 UAV apf 编队控制 动态规划 多机器人 编队采用领航跟随,避障与避碰采用人工势场法无人机
蚁群算法结合遗传算法 ACO-GA 路径规划算法 SSA 麻雀算法 传统蚁群 ACO 路径规划 aco ga算法 Matlab
蚁群算法 ACO aco 路径规划算法 动态障碍物 动态避障
三维RRT路径规划 改进算法 去除冗余路径点 rrt 无人机 UAV路径规划 rrt 路径规划 三维避障
改进的人工势场(APF)多智能体多目标点的路径规划。机器人路径规划。引入了智能体之间的排斥力来避免智能体之间的碰撞。
A星算法和人工势场法APF融合算法 子目标点 Astar 安全改进 不斜穿障碍物 多方向多动态障碍物 apf 改进路径规划 A*改进 astar 动态融合算法
人工势场法 APF 路径规划 有碰撞点,复航点,可计算船舶危险度,两船之间的距离,船的方向变化。apf路径规划,结合海事避碰规则,船的航向角变化,可以设置多条船
基于领航跟随法+A星(A*)Astar 结合人工势场(APF)法的多智能体编队动态避障 编队包含集结和保持队形移动两个过程 编队采用领航跟随,改进APF A*
改进动态窗口 DWA dwa 算法动态避障。融合速度障碍法VO 躲避动态障碍物,融合RRT*全局路径规划算法 增加障碍物搜索角 改进评价函数 有强的避障能力
rrt 算法 路径规划 RRT 改进RRT 动态路径规划 改进算法