V
主页
填坑+利用界面按钮打开RVIZ
发布人
回答上一个视频没解决的问题,在原有界面上添加了两个按钮分别实现打开相机和打开MoveIt!的功能。
打开封面
下载高清视频
观看高清视频
视频下载器
QT-ROS界面
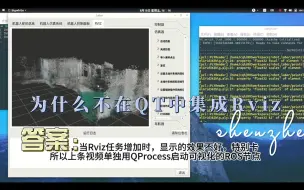
QT-ROS界面开发问题一:为什么不在QT中集成Rviz呢? 因为会卡
QT-ROS界面
点云场景滤波与实时导入至MoveIt!
基于多智能体强化学习的多小车建图与导航
DICOM医学图像显示
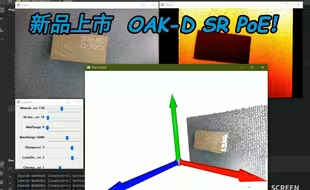
精度突破!OAK新品:探索近距新视界,高精度边缘3D AI深度相机的ToF点云效果展示
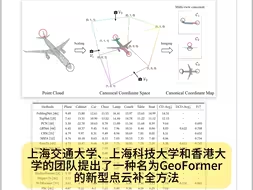
高老师团队提出GeoFormer新型点云补全方法(今日Arxiv 8月14日)2024年8月14日Arxiv cs.CV发文量约85余篇
C6-2智能车的建图与自主实现教程
基于yolo和moveit的图像识别机械臂目标抓取搬移
五子棋分拣–法奥协作机械臂FR3 ROS MoveIt-数字孪生
【开源】ROS flutter跨平台应用程序v1.0.0正式版发布,建图功能演示
调车总不能炸机了吧(●'◡'●)
[开源] 基于Flutter的跨平台ROS人机交互软件(v0.1.6) 更新多点导航功能
基于stm32和ros串口通信,利用moveit进行路径规划,将轨迹送给stm32执行,带动机械臂运动
2025年工创赛 物流搬运机器人 全流程调试
ROS机器人基于gmapping的slam自动导航建图!
CloudCompare开源中文点云网格处理软件 27—点云采样抽稀
【开源无人机】Ego-Planner参数讲解
2025工创赛物流搬运机器人 如何码垛 如何启动 注意什么??
使用相机在ROS下的TensorRT量化推理yolo模型以及使用BYTEtrack算法进行目标跟踪部分的更新
【开源无人机】Vins_fusion代码讲解
【开源无人船】从零组装一艘开源ROS无人船
路径平滑|基于共轭梯度法的轨迹优化(ROS C++/Python)
使用 PCL 的 ROS2 自动驾驶汽车点云
【考核用】调用opencv识别aruco码,在ros中更新tf
c#自制梯形图编辑器-重构编辑模块: 1、增加程序段; 2、增加局部变量; 3、节点连接模式重构; 4、优化编辑界面悬
芯探科技纯固态Flash激光雷达XT-S240Pro室外测试可达15米,有效抑制室外强光达100Klux,灰尘滤波算法及杂散点去除
宇树K1机械臂的视觉抓取仿真
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
基于ros路径规划+避障演示
仅需一步,瞬间提升树莓派5的AI算力,化身性能猛兽!
《电化学》第五期——庄林:电化学界面-理解与调控
基于ROS双臂协同的智能物流搬运系统
【汽车】软件定义汽车:基于Simulink开发面向服务的应用
《松灵ROS 2开讲啦》第五期 ROS 2中常用的SLAM建图方法
CATIA逆向设计视频课第3.1小节: 点云编辑工具条之激活activeate
【omofun复活版】onofun复活版,和原来一样好用,界面一样熟悉,免费无广!
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
《松灵ROS 2开讲啦》第六期 Nav2导航应用