V
主页
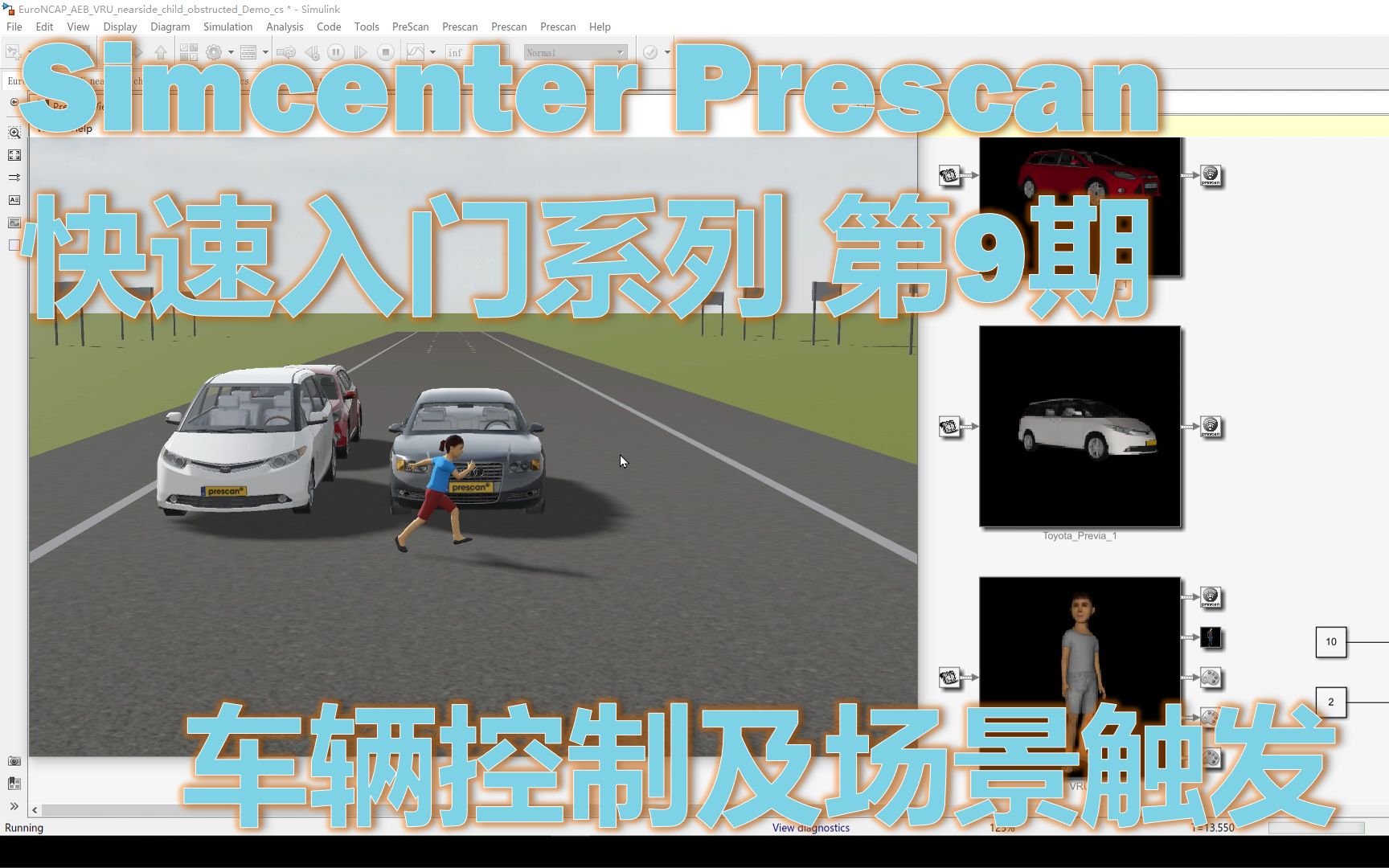
Simcenter Prescan 快速入门系列 第9期:车辆控制及场景触发设置
发布人
Simcenter Prescan 快速入门系列 第9期:车辆控制及场景触发设置
打开封面
下载高清视频
观看高清视频
视频下载器
【Simcenter Prescan 快速入门系列】 第2期:搭建MiL闭环仿真 - 验证AEB算法
【Simcenter Prescan 快速入门系列】 第1期:Prescan架构及基础场景建模
【Simcenter Prescan 快速入门系列】 第3期:通过UDP通讯实现SiL闭环仿真
【Simcenter Prescan 快速入门系列】 第4期:天气,环境光照,主动光源设置
【Simcenter Prescan 快速入门系列】 第5期:道路建模详解
Simcenter Prescan 快速入门系列 第11期 [EN] C++版本专题:01 基础场景运行
Simcenter Prescan 快速入门系列 第11期 [EN] C++版本专题:04 车辆动力学&驾驶员模型
Simcenter Prescan 快速入门系列 第11期 [EN] C++版本专题:03 如何集成算法?
【Simcenter Prescan 联合仿真系列】Prescan + Carsim
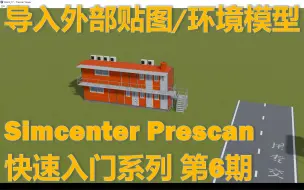
【Simcenter Prescan 快速入门系列】 第6期:导入外部贴图,3D环境模型
【Simcenter Prescan 快速入门系列】 第8期:通过OpenDRIVE/OpenStreetMap地图数据复现场景
EPLAN运动控制绘图速成专题课程
Simcenter Prescan 快速入门系列 第10期:软件自带标注功能 - User Annotation
【Simcenter Prescan 快速入门系列】 第7期:导入外部3D车辆模型,3D路面模型
YOLOv10/9/8/7/6/5/EfficientDet+车道线检测+ByteTrack跟踪:ADAS自动驾驶辅助系统(碰撞警告、车道偏离预警、车道保持辅助
汇川伺服位置控制脉冲加方向参数如何设置非常简单
案例35:PLC+触摸屏,实现滑块运动的多种控制方式
时控开关如何设置
案例36:PLC控制机械手自动搬运工件➕HMI仿真动画演示
Buck电路、正激电路设计与理解,buck电路仿真、正激电路仿真(一)
具有深度学习和计算机视觉的 ROS2 自动驾驶汽车
(一)西门子S7系列PLC CAN bus 自由通讯库的实现
使用111报文实现V90伺服扭矩控制不用750报文(FB284梯形图版)案例在评论区
几可乱真!面向真实场景的世界模型居然被用得这么六!
非常简单的程序西门子1200plc控制汇川伺服位置精准定位编写
西门子模拟量批量转换-SCL
SMART200控制三个步进(下)(结合五轴移栽机械手流水线)
不用FB284功能块直接通过111报文控制V90伺服:第1讲点动的操作(第2讲相对控制空间已发)
《用STM32制作PLC》MYPLC版本发布使用指导视频1
【MPS新品】智能汽车负载开关:MPQ587x系列
Zemax从零开始准直发散激光并用物理光学传播验证
汇川伺服脉冲加方向控制西门子1200plc硬件组态及注意事项
西门子SINA_POS(FB284)梯形图版本/使用111报文且不用750报文情况下实现对V90伺服位置和扭矩控制
如何用PLC实现星三角降压启动?从画图到编程调试保姆级讲解
【Adams】第四讲:汽车整车模型(7自由度)动力学仿真
百年供应链,是如何一步一步进化的?
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
威纶通触摸屏导入西门子1200PLC标签
仿真模拟自学方法分享
tabbed routing传输线建模仿真