V
主页
几可乱真!面向真实场景的世界模型居然被用得这么六!
发布人
极佳科技×自动驾驶之心。 随着大模型的发展,世界模型技术成为了大家关注的焦点,引起了热潮。极佳科技去年提出DriveDreamer,是全球首个真实世界驱动的自动驾驶世界模型,在工业界和学术界都引起了广泛的讨论和关注,并被国际顶级计算机视觉会议ECCV 2024录取。 同时,相关技术已经在智驾行业的头部客户中进行了落地,已服务和合作的汽车厂家和智驾方案商近20家,展现了广泛的应用前景。
打开封面
下载高清视频
观看高清视频
视频下载器
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
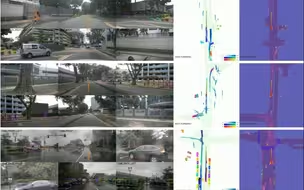
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
端到端基础!绕不开的感知模块
端到端自动驾驶:SparseDrive 算法详解
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
最新!如何使用深度强化学习在未知环境中进行导航?
从0到1!彻底搞懂BEVFormer算法原理
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
Pyramid Diffusion:精细生成3D大场景,自动驾驶高质量数据来了
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
MonoPLFlowNet:用于单目图像的现实尺度 3D 场景流估计(ECCV2022)
自动驾驶汽车是如何在高精地图中建立精确位置的?
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
特斯拉的4D自动标注详解!为什么无标注数据work?
看看顶级大佬如何梳理L2++决策算法的演进-上
自动驾驶仿真大观:聊聊仿真的研究背景
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
【CVPR 2024】鉴智机器人算法大佬揭秘3D场景流估计的最新工作——3DSFlabelling
2025秋招规控/轨迹预测,面试上来就问端到端联合预测。。。
PLUTO算法详解:端到端首次超越基于规则的方法
轨迹预测到底预测个啥???轨迹预测入门必备!
牛的!大佬是如何几分钟聊透时空联合规划框架的?
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
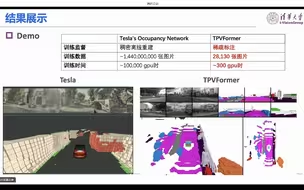
透彻!特斯拉occupancy network详解
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
自动驾驶仿真框架CARLA教程(3):Car Agent强化学习环境
最新!CoRL 2022 |Waymo分享自动驾驶行为 模型方案
Corner Case不可怕!自动驾驶Corner Case可控生成系统性解决方案来优化!
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
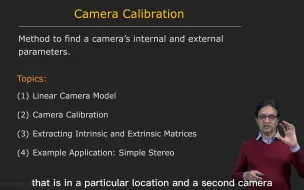
相机标定任务概述 | 哥伦比亚大学相机模型与标定系列课程(1)
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制