V
主页
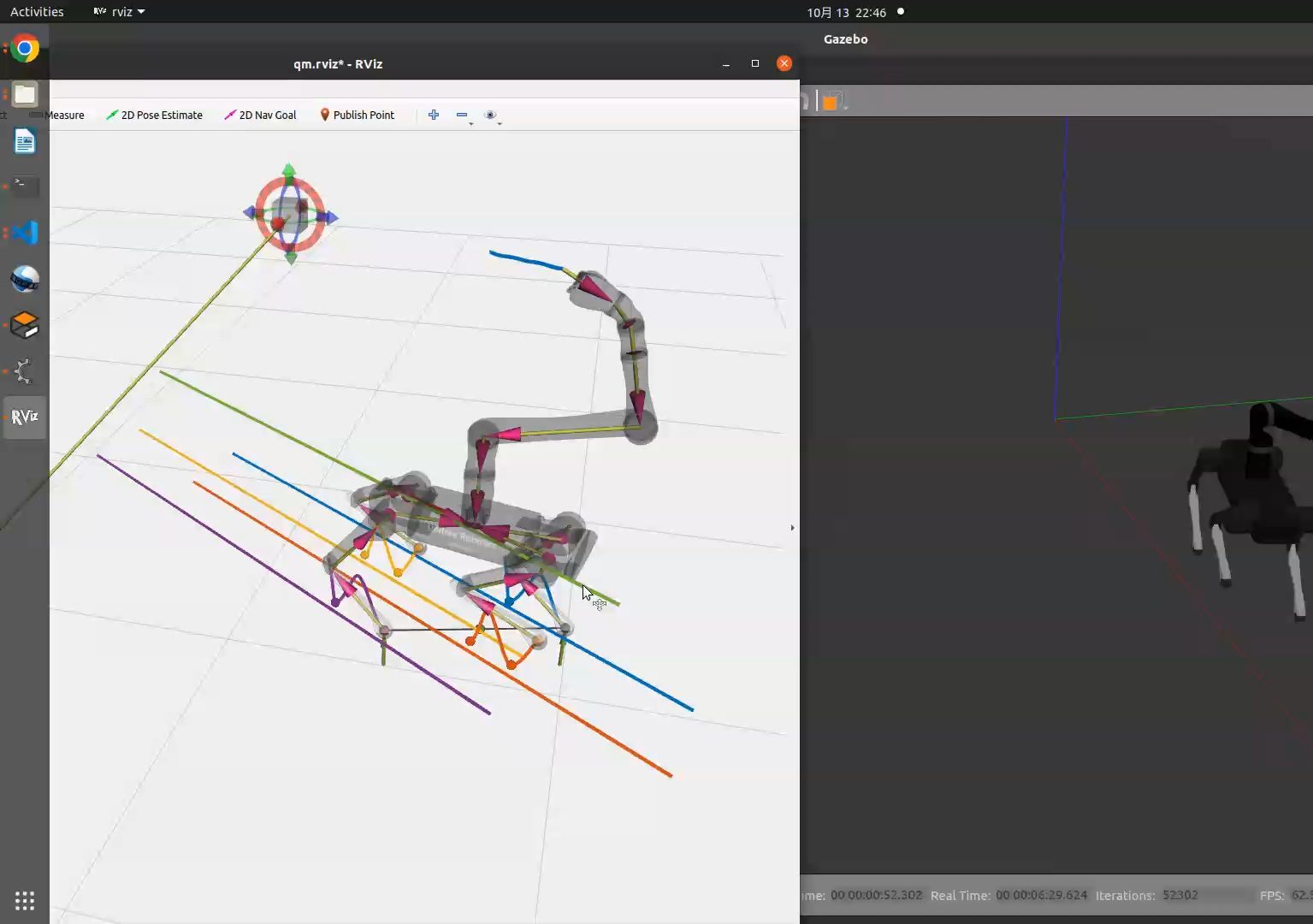
四足机器人足臂协同 ocs2 qm_control 开源项目学习
发布人
Related Paper [1] 张天霖. 基于视觉伺服与集值反馈的四足机械臂动态物体抓取研究 [D]. 哈尔滨: 哈尔滨工业大学, 2024. (for China). Notes: 可以通过哈尔滨工业大学图书馆和深圳大学城图书馆搜索查询。 [2] T. Zhang, F. Lin, X. Peng, X. Xiong, and Y. Lou. “Whole-body Compliance Control for Quadruped Manipulator with Actuation Saturation of Joint Torque and Ground Friction”, 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Accepted. https://github.com/skywoodsz/qm_control
打开封面
下载高清视频
观看高清视频
视频下载器
使用ROS2-Control + RL来控制四足机器人
今天把我做的这个机械臂开源
[23 RAL]利用实时非线性 MPC 实现双足运动的无缝反应策略
微型六轴机械臂测试
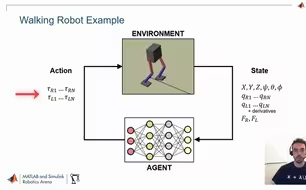
双足机器人的深度强化学习- MATLAB and Simulink
右边两足走路也是双足行走
汽车行业为什么叫高端制造业,这些顶级机器人代替人工焊接一般人都见不到,这下你知道汽车都是由机器人生产出来的吧!#制造业
波士顿动力 Spot 足臂协同操作
《关于大一新生做的抓取物体机械臂这档事》
负载可达1吨的Scara 机器人,由安川机器人推出。
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
捆绑play
Consensus Complementarity Control for Multi-Contact MPC
呐,这就叫优雅!这就叫专业! Boston Dynamic Spot
基于stm32和openmv的视觉机械臂.
鸟类和变形翼无人机的灵活栖息动作 | 2024 洛桑联邦理工大学
基于分层优化的四足机器人全身运动控制搬运重物
FANUC发那科机器人编程(共18集)
OCS2 安装例程demo测试 太难安装了 但是库确实牛!!!
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
手搓机械臂
Learning legged locomotion, RL as one tool in an engineered system
Dummy2 机械臂全新升级谐波无刷电机版 全新开源力控 可跟换夹头 夹爪来了😄
工业机器人干涉区 焊接干涉区
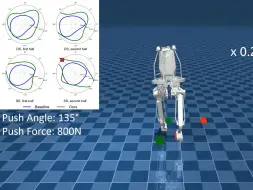
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
仿迪士尼双足机器人,mini版,高约35cm
强化学习魅力时刻
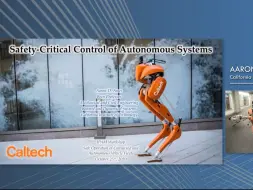
Safety-Critical Control of Autonomous Systems -Aaron Ames
Real-Time Constraint-Based Planning and Control of Robotic Manipulators
强化学习,启动!
机械臂码垛实验[金工实习]
力反馈手套在遥操作方案中的应用
241 这才是机器人的快换
机械臂还能这样玩?
舵机拉线机械手 就问你土不土
强化学习四足机器人三
舵机3D打印人形机械手
双足机器人步态生成 MATLAB and Simulink
奔跑有点难度,步态很抽象,大佬们有没有什么好建议
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications