V
主页
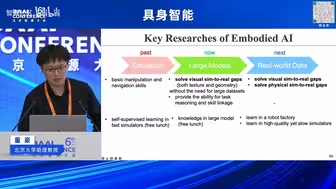
【北京大学-董豪】具身智能技术趋势分析 2024.8
发布人
回答了具身智能技术G3、G4的必要性,以及真实数据、仿真数据、互联网数据之间的关系。 (未经允许请勿二次传播)
打开封面
下载高清视频
观看高清视频
视频下载器
【北京大学-董豪】具身智能关键技术研究:操纵、决策、导航 2024.6
【LeRobot】中文字幕|Diffusion Policy: LeRobot Research Presentation 2 by Cheng Chi
【论文速递】具身智能机器人新里程碑!!3D-VLA:上海交大+MIT联合发表,具身智能突破2D基础模型,实现3D世界模型
【论文速递】具身智能SayPlan: ChatGPT + Robotics + 3D Scene Graphs
智元机器人全网最硬核技术拆解(灵巧手细节开源)
讲座 | 具身智能视角下的三维场景理解、生成与交互——北京通用人工智能研究院研究员贾宝雄
很多研究人员都放弃具身智能了
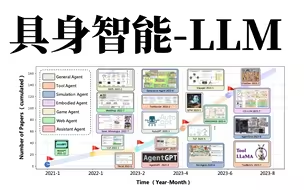
【共享LLM前沿】直观理解具身智能-LLM大模型优化技术!
具身智能:怎么就是人工智能下一个浪潮?
【通往AGI值得探索的方向:具身智能】北大董豪精讲具身智能关键技术研究:操纵、决策、导航!多模态大模型、机器人
2024世界人工智能大会(合集)
具身智能技术路线详细讲解!大白话具身智能! #大模型 #具身智能 #机器人
成为机器人具身智能公司offer收割机之宇树科技
姚顺雨-语言智能体博士答辩 Language Agents: From Next-Token Prediction to Digital Automation
讲座 | 三维场景中的具身多模态感知与交互——上海人工智能实验室研究员王泰
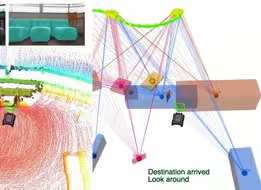
【论文速递】CVPR2024满分论文!! EmbodiedScan:MultiModal + EmbodiedAi + 3D
ALOHA模仿学习ACT真机实践——笨蛋机械臂两天才学会瓶子
具身智能——LLM for robotics
具身智能专题会议-2024年09月26日
【论文速递】具身智能SayNav:Robotics+LLMs+Scene Graph+Low Level Planner
[2024北京智源大会]具身智能
智元机器人亮相世界机器人大会
【全程回放】智元远征A1新品发布 开启具身智能新纪元!
2024北京智源大会-具身智能
具身智能基础技术路线
AIRS in the AIR | 面向通用机器人的具身多模态大模型系统
具身智能技术综述上
机器人具身智能如何快速入门?掌握学习技巧,小白也能成大牛
【LeRobot】中文字幕|OpenVLA: LeRobot Research Presentation 5 by Moo Jin Kim
具身智能:信仰还是FOMO?
讲座 | 大模型在具身多智能体合作中的研究进展与展望——清华大学在读博士郭旭东
Talk|清华大学诸子钰:面向具身智能的通用3D视觉语言理解
上海交大卢策吾:具身智能与他的首个刮胡子机器人 | 智者访谈
北京大学董豪-《深度学习入门与实践》第一节:神经网络基础
你的具身智能第一课--基础技术路线
【中英字幕】波士顿动力公司创始人Marc Raibert WRC2024 问答剪辑
星尘智能S1正式发布:为你而生 为你而智
具身智能
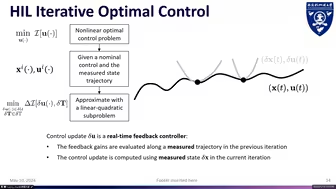
面向机器人系统的迭代最优控制算法研究和开发
讲座 | 基于多模态思维链的端到端具身智能大模型EmbodiedGPT——香港大学在读博士穆尧