V
主页
具身智能技术综述上
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
具身智能综述下
具身智能-通用抓取综述(learningl base 端到端派)
isaac sim具身智能仿真系列:【1】管他37 21,装好了仿真就算是具身大佬了(佛系胡乱更新中)
全网首个灵巧手课程-灵巧手综述
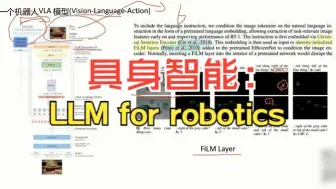
具身智能——LLM for robotics
李飞飞团队最新成果,基于大模型的机械臂抓取
具身智能-ACT代码框架啊
国内首个面向具身智能方向的理论与实战系统课程
具身智能基础简述
具身智能课程-pybullt仿真器学习第一课
硬核手搓,全程开源。具身人形机器人第二期,本次视频更新也附带了我们现阶段所有的流程开源
具身智能课程-pybullt仿真器学习第二课
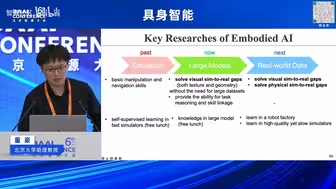
[2024北京智源大会]具身智能
【isaac sim-15】具身仿真-你的第一个机械臂程序
具身智能:怎么就是人工智能下一个浪潮?
智元机器人全网最硬核技术拆解(灵巧手细节开源)
具身通用智能与人形机器人|清华大学交叉信息研究院助理教授,北京星动纪元科技有限公司创始人陈建宇精彩分享
机器人具身智能如何快速入门?掌握学习技巧,小白也能成大牛
具身智能基础技术路线
【北京大学-董豪】具身智能技术趋势分析 2024.8
【北京大学-董豪】具身智能关键技术研究:操纵、决策、导航 2024.6
具身智能灵巧手是怎样练成的?
【通往AGI值得探索的方向:具身智能】北大董豪精讲具身智能关键技术研究:操纵、决策、导航!多模态大模型、机器人
具身智能技术路线详细讲解!大白话具身智能! #大模型 #具身智能 #机器人
讲座 | 视觉推理与具身智能——上海交通大学长聘教轨助理教授、博导李永露
具身智能-通用抓取综述(model base 3D视觉派)
具身智能
你的具身智能第一课--基础技术路线
具身智能大爆发,有灵魂的机器人要来了
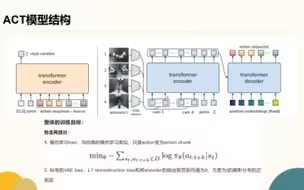
斯坦福ACT算法原理2-ACT模型
0基础学习具身智能第一步,仿真数据使用
AIRS in the AIR | 机器人的场景理解与任务运动规划
CVPR 2024 - 具身智能中的多模态三维感知思考
入门机器人Diffusion Policy
斯坦福ACT算法原理1-生成式模型(具身智能)
0基础学习具身智能第一步,选择自己的仿真平台
具身智能领域最容易落地的方向-遥操作
AIRS in the AIR | 面向通用机器人的具身多模态大模型系统
斯坦福ACT算法原理3-面试经验
上海交大卢策吾:具身智能与他的首个刮胡子机器人 | 智者访谈