V
主页
【Advanced控制理论】20_非线性控制理论串讲+闲话
发布人
非线性控制理论串讲+闲话
打开封面
下载高清视频
观看高清视频
视频下载器
【Advanced控制理论】11_现代控制理论串讲(state space)
【Advanced控制理论】9_状态观测器设计_Linear Observer Design_Matlab_Simulink建模(上)
五万粉丝问答闲话_关于科研与工程,关于考研与就业~~~DR_CAN
【Advanced控制理论】15_Nonlinear Backstepping Control_反馈线性化控制_Feedback Linearization
【非线性控制理论】反步设计法(个人最详细的讲解)
【动态系统的建模与分析】1_课程介绍
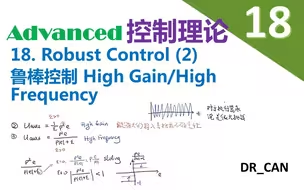
【Advanced控制理论】18_Robust Control (2)_鲁棒控制_High Gain_High Frequency
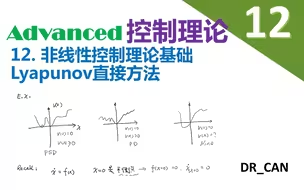
【Advanced控制理论】12_非线性理论基础_Lyapunov直接方法
【Advanced控制理论】9_状态观测器设计_Linear Observer Design_Matlab_Simulink建模(下)
【最优控制】3_动态规划_Dynamic Programming_代码详解
【自动控制原理】1_开环系统和闭环系统_反馈控制_Open/Closed Loop System_Feedback
滑模控制基本概念,非线性系统控制器设计以及simulink仿真初步
【自动控制原理】12_PID控制器_Matlab/Simulink仿真【开场三分钟闲话】
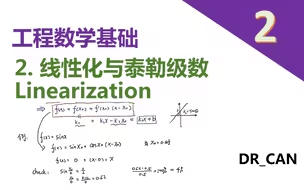
【工程数学基础】2_线性化_泰勒级数_泰勒公式_Linearization
【最优控制】2_动态规划_Dynamic Programming_基本概念
【Advanced控制理论】14_Nonlinear Basic Feedback Stabilization_非线性系统稳定性设计
【最优控制】1_最优控制问题与性能指标
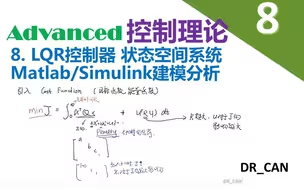
【Advanced控制理论】8_LQR 控制器_状态空间系统Matlab/Simulink建模分析
【Advanced控制理论】16_Nonlinear Adaptive Controller_非线性自适应控制器
李雅普诺夫稳定性解题方法总结!!!李一法 李二法 李雅普诺夫函数 李雅普诺夫方程 克拉索夫斯基法 雅可比矩阵法 李雅普诺夫稳定性 现代控制理论 考研控制 自动化
工科学姐分享::控制理论&智能算法自学思路
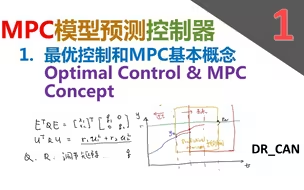
【MPC模型预测控制器】1_最优化控制和基本概念
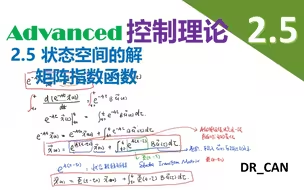
【Advanced控制理论】_2.5_状态空间方程的解_矩阵指数函数
【动态系统的建模与分析】10_二阶系统对初始条件的动态响应_Matlab/Simulink_2nd Order System Response to IC
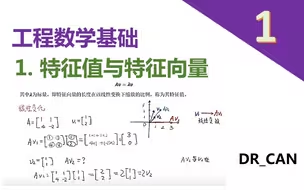
【工程数学基础】1_特征值与特征向量
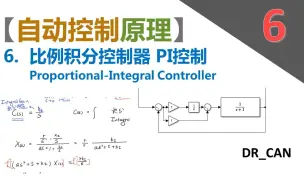
【自动控制原理】6_比例积分控制器_PI控制
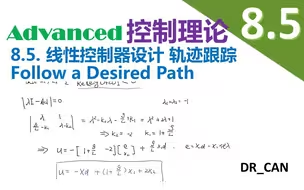
【Advanced控制理论】8.5_线性控制器设计_轨迹跟踪(Follow a Desired Path)
【MPC模型预测控制器】3_一个详细的建模例子
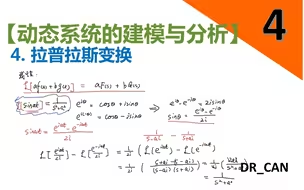
【动态系统的建模与分析】4_拉普拉斯变换
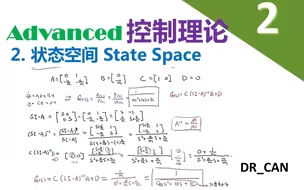
【Advanced控制理论】2_状态空间_State Space
【Advanced控制理论】17_Robust Controller_非线性鲁棒控制器_Sliding Mode_滑模控制
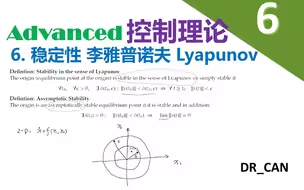
【Advanced控制理论】6_稳定性_李雅普诺夫_Lyapunov
【Advanced控制理论】19_三种鲁棒控制器的比较+如何分析控制器_Matlab Simulink
【2025自控考研基础课】自动控制理论/自动控制原理 第八章 非线性控制系统分析<上>
【卡尔曼滤波器】1_递归算法_Recursive Processing
【最优控制】5_线性二次型调节器(LQR)详细数学推导
【自动控制原理】10_超前补偿器_Lead Compensator_PD控制器_比例微分控制
【动态系统的建模与分析】14_二阶系统频率响应_数学推导部分
【最优控制】9_轨迹追踪(3)- 输入增量控制
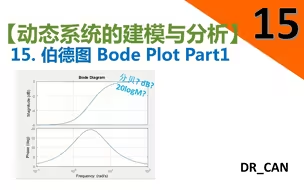
【动态系统的建模与分析】15_伯德图,为什么是20logM?分贝又是什么?_Bode Plot_Part1