V
主页
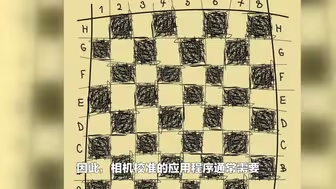
相机标定:原理+实战
发布人
网络分享
打开封面
下载高清视频
观看高清视频
视频下载器
相机标定:从入门到实战【01概述】
相机标定的基本原理与经验分享
海康视觉初级培训
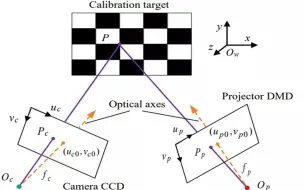
3.1 相机标定的基本概念
【计算机视觉】相机标定/双目测距/Camera Calibration
单目相机标定理论及张正友标定法
智能无人机
相机标定的基本原理与经验分享
【机器视觉】Halcon入门教程——相机标定及其测量
聊-海康机器视觉-标定板标定-图像坐标转物理坐标
2024硬核C/C++高级架构工程师进阶教程(完整版),挑战百万年薪offer!
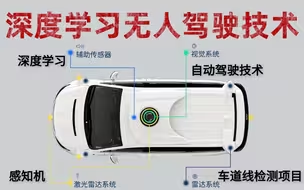
【自动驾驶技术】花18000大价钱买的无人驾驶课程,从入门到提升的自动驾驶算法——感知实战、视觉定位、预测系统、路径规划、控制理论、强化学习
halcon初级系列课程讲解
【标定】机器人手眼标定-方法及原理
电气工程Matlab/Simulink全套
海康相机中级培训
移动机器人规划控制入门与实践:基于navigation2
28.6.6【定位】上下相机各自基准对位
ROS2从初级到高级(LEVEL2):使用 URDF 设计自定义机器人,在 Gazebo 中模拟机器人
相机标定:从入门到实战【02相机基础知识】
26.6.4【定位】多相机单点纠偏
ROS2 路径规划和计算机视觉迷宫求解
为什么要进行相机标定?
手把手教你用YOLOv8训练自己的数据集(原理解析+代码实践)
Python办公自动化
带 SLAM 和 Nevegation2 的 ROS2
【Python基础课程营(合) 】
ROS2从初级到高级(LEVEL1):掌握 ROS 2 基础知识并成为机器人操作系统开发人员
具有深度学习和计算机视觉的 ROS2 自动驾驶汽车
ROS2自动驾驶|边做边学(一)里程计与控制
自动驾驶关键技术
德国的硕士论文水平真高
YOLOv8使用C++在RK3588上部署
Python深度学习+人脸识别、商品物体检测实战_350讲带源码课件资料
车载单片机与总线技术
Python网络爬虫
CUDAMODE《CUDA、GPU编程|CUDA MODE》中英字幕(豆包翻译
传热学