V
主页
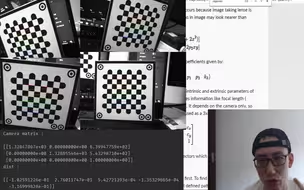
【3D视觉工坊】第二期公开课:相机标定的基本原理与经验分享
发布人
直播课件: 在公众号「3D视觉工坊」后台回复「相机标定」,获得直播课件pdf。 主讲嘉宾: 上海交通大学在读博士生,主要研究自由型面的精密测量方法,「3D视觉从入门到精通」星球嘉宾。 课程大纲: 1.相机模型 2.张正友标定简介 3.改进方法 4.实际标定操作技术全面详解 5.实际标定操作技术全面详解
打开封面
下载高清视频
观看高清视频
视频下载器
相机标定:从入门到实战【01概述】
相机标定的基本原理与经验分享
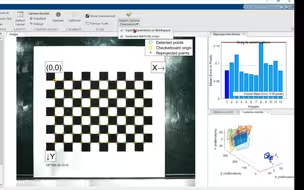
相机标定:从入门到实战【06MATLA相机标定工具】
双目相机标定及参数写入
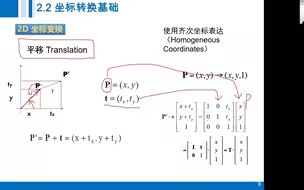
2.2 坐标转换基础
手眼标定—原理与实战(上篇)
【标定】机器人手眼标定-方法及原理
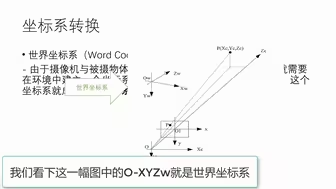
三维重建第三课:相机标定原理步骤(一)坐标系变换
单目相机标定理论及张正友标定法
OpenCV相机标定
双目相机标定基础及标定实战
相机标定:从入门到实战【02相机基础知识】
相机标定步骤和影响标定板精度的主要因素
为什么要进行相机标定?
【计算机视觉】相机标定/双目测距/Camera Calibration
聊-海康机器视觉-标定板标定-图像坐标转物理坐标
【机械臂入门教程】机械臂视觉抓取从理论到实战
深度相机概述
双目相机立体匹配基础(上篇)
从零搭建一套结构光3D重建系统 [理论+源码+实践]
双目相机原理揭秘--双目立体视觉原理搞懂很简单
三维重建第七课:相机标定代码讲解
相机标定:从入门到实战【05相机标定方法】
3.1 相机标定的基本概念
三维重建第五课:相机标定原理步骤(三)张正友相机标定法初见和单应性
绪论|单目相机标定理论及张正友标定法(上篇)
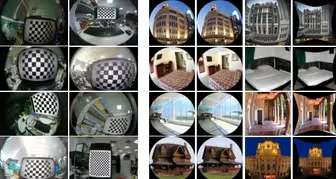
鱼眼相机标定基础(上篇)
单目相机标定及张正友标定基本原理
基于Python的单目相机标定理论+实践
单目相机标定总结及实战
搞懂了!原来激光雷达和相机的内外参是这样标定的
相机标定原理:张正友论文详解
2022B站最好最全的【三维重建】课程!!!北邮教授竟然把三维重建讲的如此通俗易懂,学不会UPZHIJIE 退网下架!!!-人工智能/计算机视觉/三维重建
北交博士主讲:深度学习驱动下的相机标定技术发展(下篇)
双目相机标定基础及标定实战
1 课程介绍-绪论
【B站最好的OpenCV课程推荐】OpenCV从入门到实战 全套课程(附带课程课件资料+课件笔记)图像处理|深度学习人工智能计算机视觉python+AI
张正友相机标定法 确定相机内外参数、畸变系数,OpenCV C++代码实现
双目深度估计实战(上篇)
使用matlab和opencv进行相机标定