V
主页
京东 11.11 红包
基于改进粒子群在ros中实现三机器人多目标路径规划
发布人
结合K均值粒子群实现多机器人多目标路径规划
打开封面
下载高清视频
观看高清视频
视频下载器
ros机器人多目标路径规划
粒子群ros全局路径规划插件
ROS普通粒子群算法路径规划插件
基于改进粒子群实现单机器人在ROS中多目标路径规划
蚁群算法实现机器人多机器人多目标路径规划
萤火虫算法ros路径规划插件
IEEE顶刊:水下机器人AUV路径规划和MPC模型预测控制跟踪控制(复现)
ros全局路径规划插件教程2
ROS遗传算法全局路径规划插件
ROS控制 | 第一轮控制功能包讲解
ros全局路径规划插件教程8
ROS遗传算法全局路径规划插件
地图分区全覆盖路径规划
ros全局路径规划插件教程10
ros全局路径规划插件教程4
蚁群ros全局路径规划器
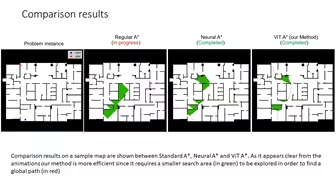
[Humanoid 2023] ViT A*: Legged Robot Path Planning using Vision Transformer A*
ros全局路径规划插件过程3
粒子群算法和遗传算法融合,在ROS中实现多机器人多任务执行
狼群算法ROS全局路径规划插件
基于MATLAB/simulink的B样条曲线路径规划自动平行泊车
第22讲:三维激光+视觉 SLAM仿真
第23讲:Move_base二维自主导航规划
sw模型转urdf包括运动配置
240927智慧社区第一期ROS培训
IEEE'24 | 最小成本!安全协作!异构无人机飞行的路径规划新策略!
03_路径发布节点解读-1
ROS下多机器人融合建图
【开源教程】ROS+PX4开源机械臂控制(下)
强化学习-自动驾驶路径规划控制决策-sac的高速公路和遮挡场景训练
04_PID改进讲解-1
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
视觉组 | YOLO自瞄终于能打中了
ROS2功能包与三大通信机制编程
第20讲:三维激光雷达SLAM仿真
[开源] 基于Qt的ROS1/ROS2人机交互软件-V0.3.7版本,优化建图时的地图显示效果
学习小记:如何解决Rviz和Gazebo中机器人运动不同步的问题(Rviz中机器人固定不动的问题)
【开源教程】ROS+PX4开源机械臂控制(上)
铰接式车辆的运动规划
室外ROS 深夜调车,一鼓作寄