V
主页
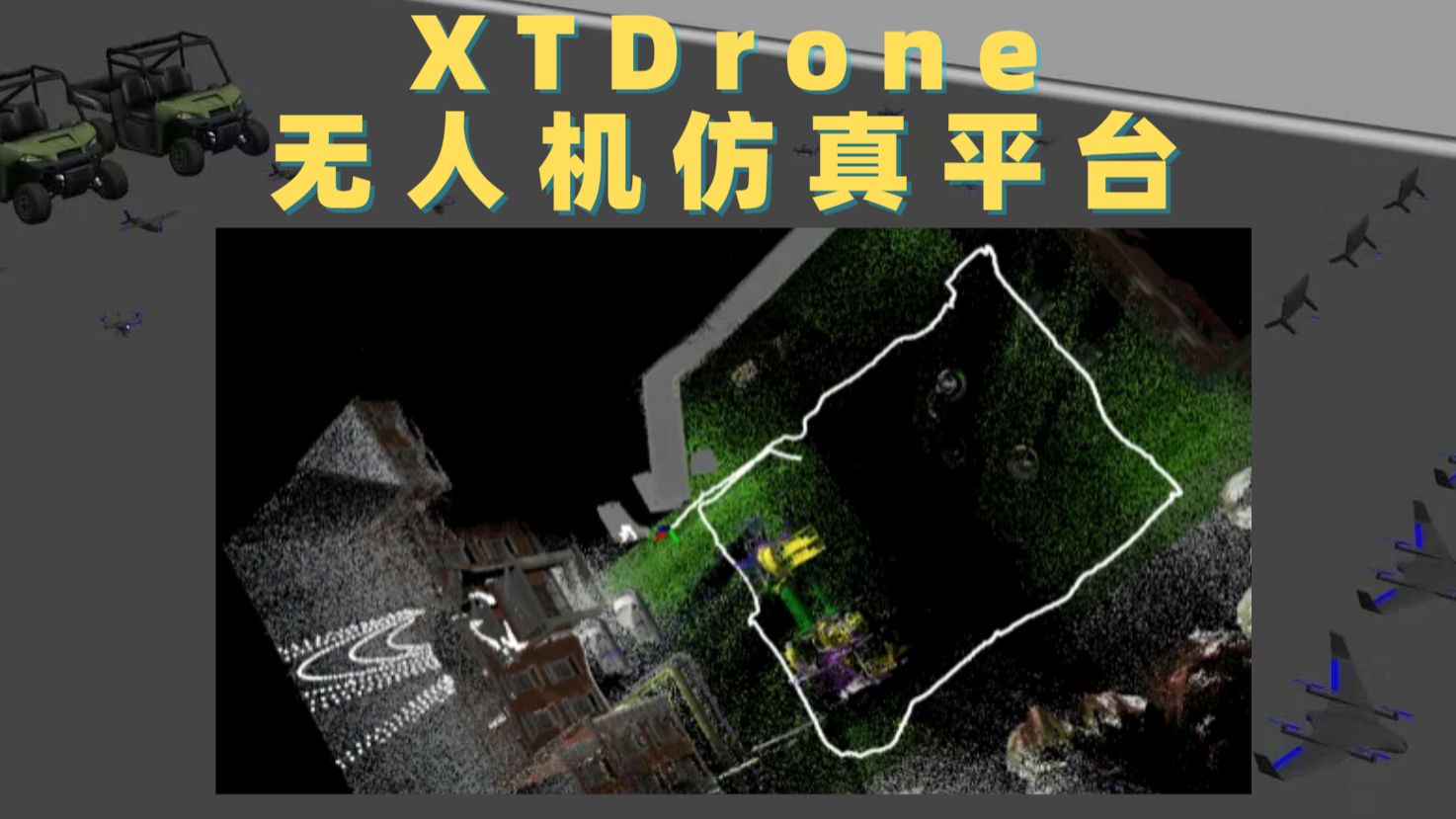
第22讲:三维激光+视觉 SLAM仿真
发布人
XTDrone使用说明文档:https://www.yuque.com/xtdrone/manual_cn/basic_config_13 XTDrone源码开源地址:https://gitee.com/robin_shaun/XTDrone B站工房同款 豪华版: https://gf.bilibili.com/item/detail/1107552044 B站工房同款 基础版: https://gf.bilibili.com/item/detail/1107551044 整合包使用介绍文档:https://www.yuque.com/woshihenyouxiude/lwkpvm/bl2h1k3sh6dnru0y
打开封面
下载高清视频
观看高清视频
视频下载器
要啥激光雷达,2D、2.5D、3D地图我全都有,Factor Perception SDK纯视觉SLAM地图数据展示
【开源无人车】从零组装一辆开源PIX无人车
摇啊摇,跳啊跳,手持slam第一人称视角
22年十佳开源SLAM算法
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
Isaac Sim和ROS2自主移动机器人(bcr_bot)
【开源无人机】从零调试一架开源无人机M0-F250
第26讲:无人机检测与追踪行人(YOLO)仿真
无人机SLAM入门教程(一):课程概述1.1 SLAM基础概念
基于Gazebo的无人车激光SLAM建图与导航仿真
IEEE RAL空间机器人视觉导航/SLAM算法评估 Pyojin Kim发表首个舱内机器人外太空视觉-惯性数据集
马斯克特斯拉机器人的最新视频和技术解析
【开源无人机】从零组装一架开源无人机M0-F250
深度视觉,三维感知!全新3D深度视觉机械臂闪亮登场,空间抓取、体积测算统统不在话下!
机器人移动底盘
极致丝滑的60帧无人机仿真环境到底有多爽!
ROS2GO CUDA:开启 AI 与机器人开发的新纪元
要啥激光雷达,Factor Perception SDK夜间纯视觉SLAM演示
第8讲:多旋翼姿态控制示例
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
【开源无人机】ROS系统中yolo模型处理多摄像头
第4讲:键盘控制代码精讲
【开源无人机】S2-F290无人机自主飞行,俯视监控,全方位精准避障
[仿真]无人机全自主探索+导航的代码及逻辑教学
第14讲:基于相机视觉的SLAM
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
弱光环境下的SLAM系统
智在臂得,3D深度视觉机械臂轻松搞定三维空间环境感知,体积测算、空间抓取,简直超酷!
SLAM系统-上 北邮教授深入浅出三维视觉技术(全网质量最高)
大家对这个mid360雷达呼声很高嘛|做出来演示一下
【开源无人机】move_base自主导航参数详解
[仿真]无人机自主飞行圆轨的代码及逻辑教学
第3讲:配置与控制不同的无人机
低成本超小自主飞行无人机,开导!
端到端机械臂视觉抓取无人配送的场景演示
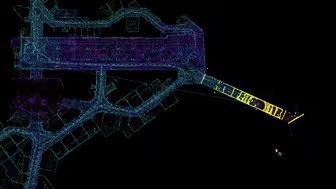
一个没啥特点的工程化激光slam(某二线城市的“大型”地铁站)
第9讲:用Docker快速部署仿真环境
第11讲:动态增加无人机数量
电饭锅们出来军训了ʕ ᵔᴥᵔ ʔ
超维小课堂(三十四):开源飞控PX4悬停油门参数调试