V
主页
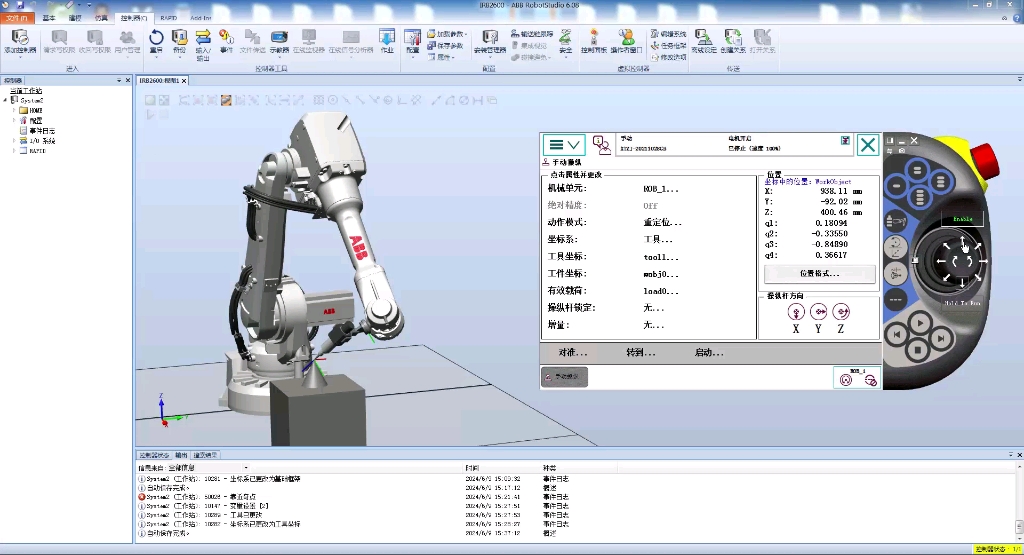
同学们这就是机器人TCP点重定位,是不是跟我以前讲过的多轴机床RTCP刀尖跟随一样!
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
Vericut控制器有rtcp和没有rtcp的区别
西门子840DSL系统磨耗使用方法!
Vericut角度头的五轴仿真案例
面试官:TCP四次挥手如何工作的?
西门子840/828修改系统时间
Vericut常见问题之切削毛坯已松开并且临时保存在松开毛坯中
西门子828D系统对刀练习2
寒假已经半个月了本教授在研究什么?全金属狂潮和天之痕!哈哈哈!
海德汉530系统3+2定向加工
vericut的海德汉640支持CYCL19和空间角功能吗?
这不是切的钢件,是切的豆腐吧!这卧式加工中心哪里比进口机床差?
VERICUT程序优化中的切入切出的应用
碰到来应聘卧式加工中心的女装配师,你会如何选择?
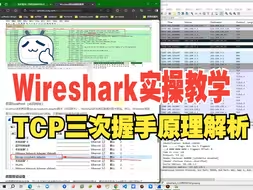
一步一步教你用Wireshark分析TCP三次握手
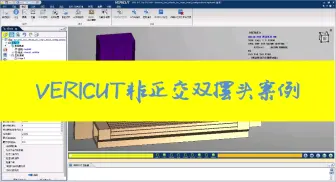
Vericut非正交双摆头案例
机械加工最解压
定位精度vs重复定位精度vs分辨率,3分钟搞清关系!
Vericut双主轴搭建也能换钱吗?
如何用铜带制作披甲?【冲压工艺科普】
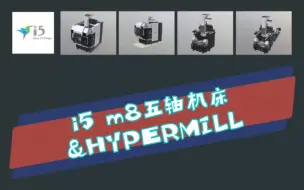
i5 m8五轴机床&HYPERMILL
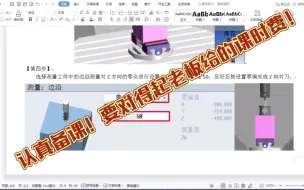
认真备课要对得起老板赏的课时费!
【纳米技术公司】Nanotechnology 超精密加工系统
整理硬盘发现好多数控编程的古董!
同是搞机加工的,搞五轴的师傅操作的机床又好看,人又长得帅,工资还高,搞3轴的老铁,有想学习搞五轴的吗?#五轴编程培训 #机床操作 #数控加工
洗啥脚能洗6000,她不会被卧式加工中心客户骗了吧?
ABB机器人实时回传当前TCP线速度给PLC
你们碰过女朋友手机吗?全国通用卧式加工中心女生手机也是碰不得
西门子840系统刀具长度补偿的方向问题
双足机器人isaacgym训练后sim2sim到mujoco扭成麻花了
太难了~在卧式加工中心里怎么着都不行
到了天津改版天津卫还是挺接地气的#天津卫 #相声 #天津 #溜娃模式 #机床
环形驱动器再升级,用于机器人关节模组
海德汉卧加上打个叉有多大红包?
重力势能车
主轴维修! 贺师傅找借口了,明明是没修好,硬要说人家主轴设计有问题!
vericut双主轴坦克大战
主轴维修!西安展会! 之前我们看过五轴的谐波减速器,它的应用是非常广泛的!
西门子铰孔循环CYCLE85
没用过plus弄个软件熟悉下,别回头上课翻车了……
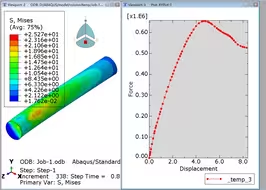
ABAQUS偏心受压柱分析