V
主页
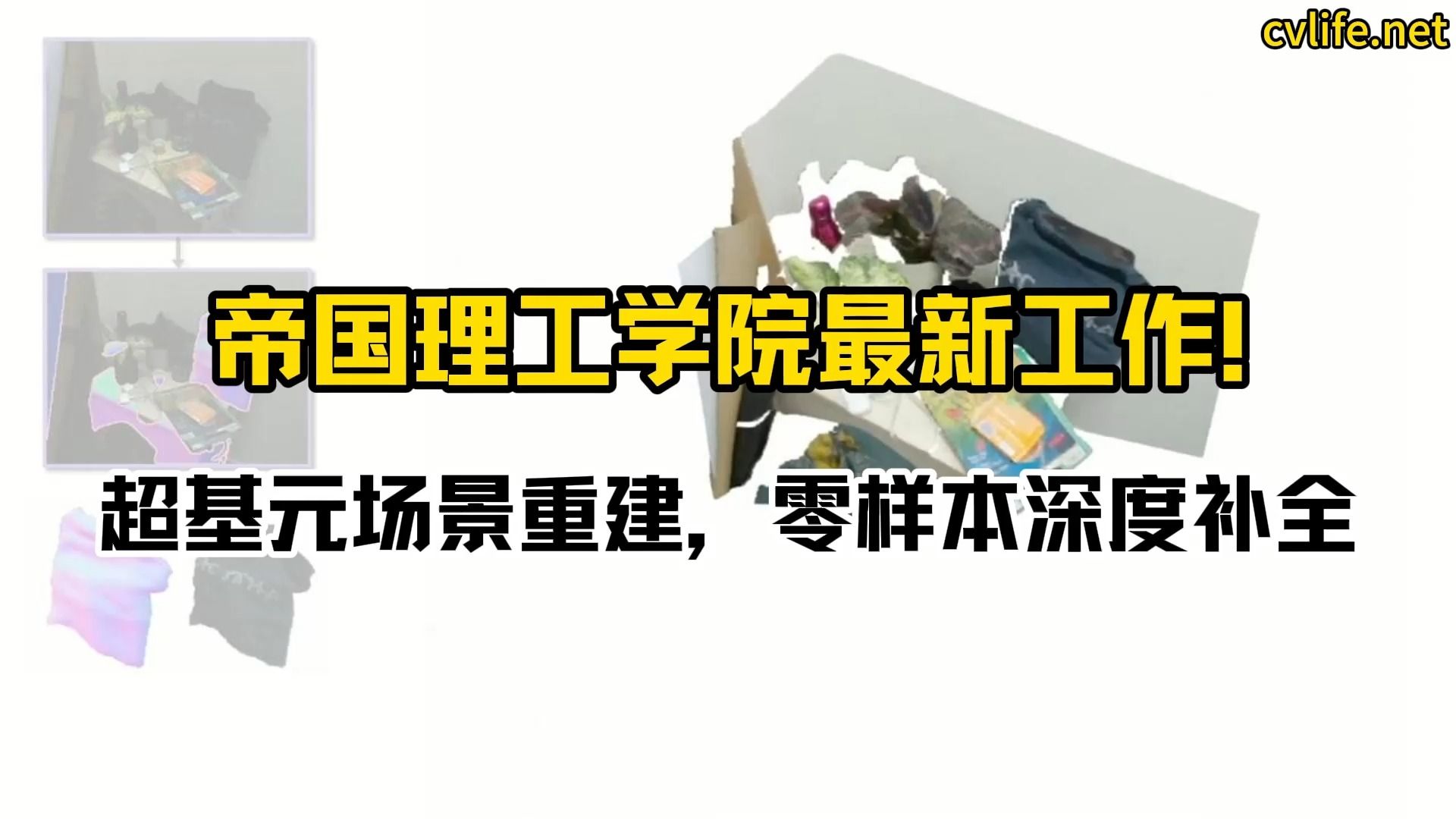
帝国理工学院最新工作!超基元场景重建,零样本深度补全
发布人
由于计算复杂性和固有的视觉模糊性,从一组图像或单目视频中联合估计相机位姿和稠密几何仍然是一个具有挑战性的问题。大多数稠密增量重建系统直接对图像像素进行操作,并使用多视图几何线索来求解它们的3D位置。这样的像素级方法存在歧义或违反多视图一致性(例如,由无纹理或镜面表面引起的)的问题。 我们用一种新的图像表示来解决这个问题,我们称之为超基元。SuperPrimitives是通过将图像分割成语义相关的局部区域,并使用估计的表面法线方向对其进行增强得到的,这两个区域都是由最先进的单图像神经网络预测得到的。这提供了每个SuperPrimitive的局部几何估计,同时它们的相对位置根据多视图观测值进行调整。 我们通过解决三个三维重建任务:深度补全,稀疏角运动恢复结构和单目稠密视觉里程计来证明我们的新表示的通用性。 文章名称:【SuperPrimitive: Scene Reconstruction at a Primitive Level】 文章链接:https://makezur.github.io/SuperPrimitive/assets/pdf/SuperPrimitive.pdf 项目主页:https://makezur.github.io/SuperPrimitive/ 作者单位:戴森机器人实验室(帝国理工学院)
打开封面
下载高清视频
观看高清视频
视频下载器
静怡夜晚小路-场景动态
MACROSS sdf-1会场大型场景模型
福建舰开始弹射测试,橙色小车被电弹甩入海中,福建舰航母有多强
UE5场景|古式渔村|国风
“可是,他们什么都没有做错”
常用电气符号
四轴就像开了水龙头一样,水流哗哗的。
清华深研院、哈工深发布!Lidar视觉紧耦合实时相对定位
手把手教你编译运行VINS代码
【直播回放】学习大礼包
C4D反光板映射的妙用10-工程分享 渲染技巧 手机 透明场景
大庆油田 采油六厂 西二路边的老抽油机
华科、华为联合开源!实时动态场景4D高斯泼溅,最高 82fps!
洛克希德 SR-71 黑鸟的工作原理 How the Lockheed SR-71 Blackbird Works
制海舰重获新生,黄蜂级中东作战,美军远征打击群主力!
武汉大学开源! 集成惯性系统的统一无标定板时空标定
预积分推导5_3.6
工地上常见的平对接单面焊双面成型怎么焊?看完这条视频你就知道了#二保焊#气保焊#焊工
苏黎世大学发布!无需状态估计的视觉像素敏捷飞行
清华等联合开源!动态 3D 高斯超高保真头部重建
CMU & ICRA 2022 SLAM竞赛介绍及交流 “UGV大场景3D点云定位”和“UAV俯瞰视觉定位”
新型进气道亮相,沈飞JH-26轰炸机或打赢淘汰赛,不等轰20了?
海景电脑房间-场景动态
无GPS下,即可在杂乱的森林环境中自主飞行!宾大开源!
手把手教你学习标定基础知识
2023年,印度海军舰队规模
大型挖机改装的鹰勾臂
青砖大宅I 单价2字头,海珠都少有
华科大最新工作分享:基于激光雷达-惯导-轮速计的联合状态估计!
最新款梦幻组合—半人马机器人
成昆铁路通车场景还原,属于那个年代的场景和声音 -
漫谈:计算机哲学、技术虚无、信念、抽象、直觉、深度、架构、框架
2千年前古人的智慧,中国古代三大工程之一,坎儿井 #非遗#坎儿井 #新疆
马里乌波尔2024.8.2,重建与日常生活
01-NeRF与SLAM结合的早期探索
机器人妻子早就大批量生产了
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(上)
【直播回放】SLAM常见面试问题浅析
【原创】初学者如何入门计算机视觉?思维导图一条龙路线规划,保姆级教程!
200架6爷同时出动,全球雷达都要干冒烟,那要是200架白天鹅呢?