V
主页
让机器人学会用腿完成自动操纵:Learning Visual Quadrupedal Loco-Manipulation from Demonstrations
发布人
论文: https://arxiv.org/abs/2403.20328 网站: https://zhengmaohe.github.io/leg-manip/ 感谢支持!
打开封面
下载高清视频
观看高清视频
视频下载器
爱,死亡和机器人 第一季
【RM】这个视频告诉你谁才是现今最强地面
坏掉的重要伙伴机器人被路过的机器人工程师大哥哥修理后变成美少女机娘回来了1话
【RM2022】我突突突,专打小陀螺的自动瞄准
新型坦克杀手机器人
【阿奇】2024年科幻惊悚片《异星战境》:AI机器人产生自主意识,试图毁灭全人类
最扭曲疯狂的英雄手表Carnitrix 错误表 - 少年核客
机器狗实战演练画面首次曝光!这就是美国害怕的原因!巷战利器!
机器狗打靶归来
【AI批量做视频】手把手分享用AI批量生成说唱影视解说视频,1天生成上百条,真的赚麻了!
和Matlab大战10天,年轻人的第一台轮足Get✔
最担心的事还是发生了
从transformer到cnn到vit,两个半小时板书搞懂原理(上)
一个带智能机器人的110级的DNF版本
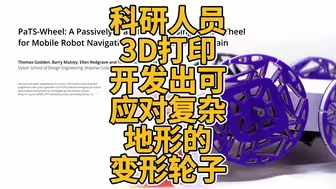
科研人员3D打印开发出可应对复杂地形的变形轮子
200年后,人工智能竟然也要被取代?!【火星特快】2024最新法国脑洞科幻悬疑
【AI换脸】如果让迪丽热巴来演涂山红红
强推!这可能是B站最新的GPT4o指导教程了,1小时讲清楚GPT4o模型有哪些显著提升,以及使用GPT4打造智能程序,看完不信你还不会玩GPT!
每天研究一个行业:服务机器人行业
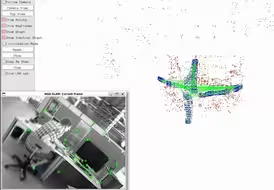
大三菜鸡毕设:无需GPU即可实时的高精度动态SLAM[开源]
陶喆在ins上点赞了这个视频
KUKA库卡机器人入门到精通
【搬运】工业机械臂的空气皮肤
ChatGPT MacOS 苹果电脑版发布|GPT-4o桌面端使用教程|无需破解下载直接安装,Option+空格一键唤醒快捷输入框,屏幕截图提问解答|暗夜飞行
戴亚克隆 超高速空战机动 动画发布 Diaclone Horus Versaulter Superfast Air Combat Maneuver pv宣传片
国产仿生机器人已经开始量产
之前视频答应姐姐们的海豚网上买开箱视频来了!
机械臂接入GPT4o大模型,秒变多模态AI贾维斯
国产聊天AI工具排行榜(2024年5月)
我的开源代码居然被盗去卖钱?AI文字搜图搜视频,语义搜索新版整合包发布!
今年单子越来越多流水越来越大,没办法只能注册公司,不想把时间浪费在杂事上,一年花3800找了个代记账公司帮我报税交社保。在西安租了一套90平的房子做办公室
【知世界】新的WIN系统或将自带会自动截图的软件?
全网最牛Stable Diffusion垫图新玩法,1分钟实现画风迁移保姆教程,controlnet最新IP-Adapter模型(附安装使用教程)
人工智能的尽头是人工
牛在画画搞艺术的时候,woof突然走到客厅在她不远处poop了🤣🤣 最近天儿太冷了可能没遛明白😅 woof的证词你们也听了 帮我翻译一下谢谢
没想到,最擅长写提GPT提示词的竟是我们中国人,就是这位才貌双全的张希拉,在新加坡首届GPT-4提示工程大赛中技压群雄,斩获头筹
这种问题真的不是机器人在问吗?"街头采访 "娱你安利 "年年有娱
七轴机械臂的运动学求解实机验证,2022年1月
“血肉苦弱,机械飞升”
RNN+KAN、TCN+KAN、Transformer+KAN实现多种回归任务指标突破!极简操作可出多种实验图!